




Linear Motion System
Search Products
- Category
- Industry
- Search by "Motions"
-

-
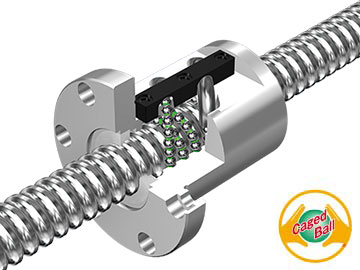
Feed Screw - Linear Motion System
Ball Screw
-

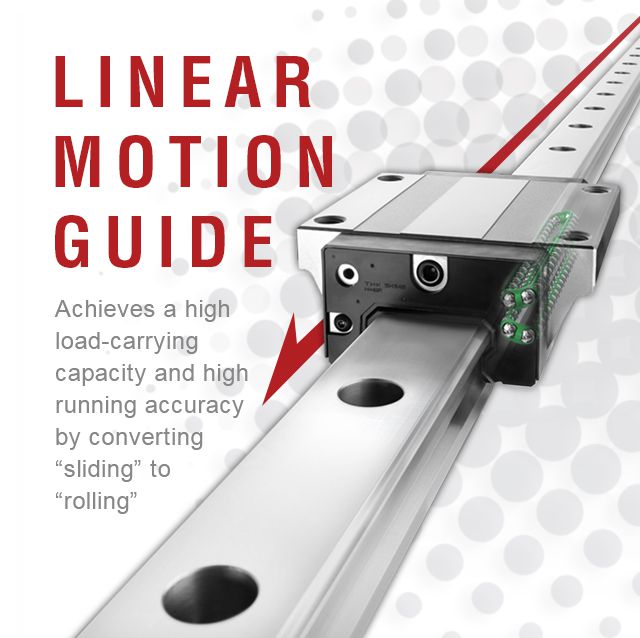
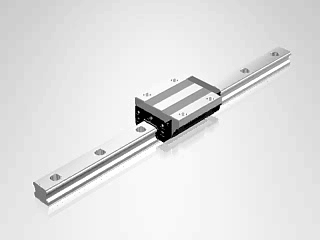
Linear Motion System
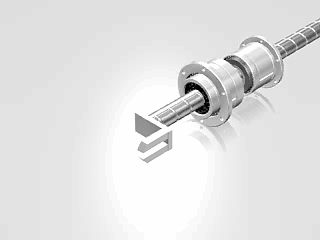
Ball Spline
-

Linear Motion System
LM Guide Actuator
-

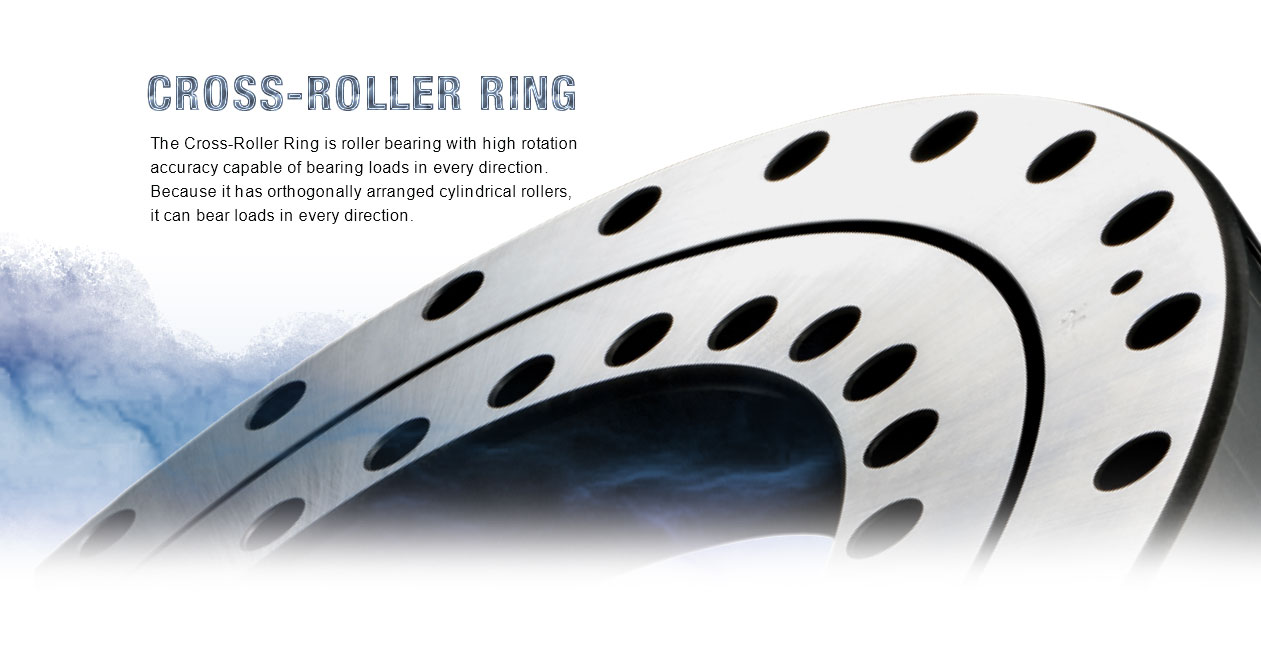
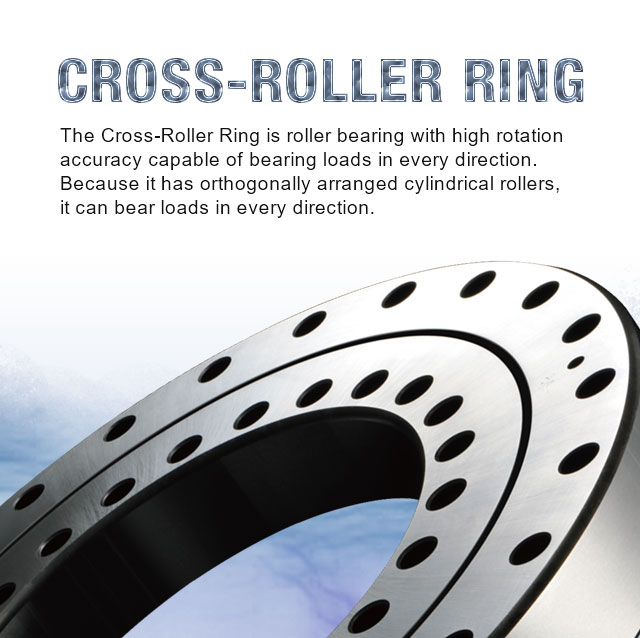
Rotation
Cross-Roller Ring
-

Electric Actuator
Electric Actuator Linear Module
-

Rotation
Cam Follower
-

Rotation
Roller Follower
-

Linear Motion System
Linear Bushing
-

Linear Motion System
LM Stroke
-

Linear Motion System
Slide Pack
-
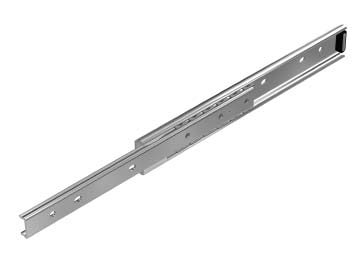
Linear Motion System
Slide Rail
-

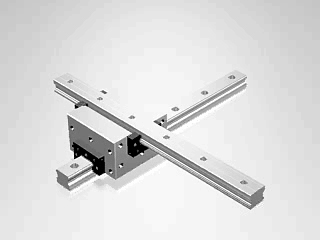
Linear Motion System
Cross-Roller Guide
-

Linear Motion System
Cross-Roller Table
-
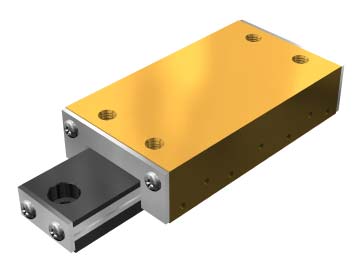
Linear Motion System
Linear Ball Slide
-
Linear Motion System
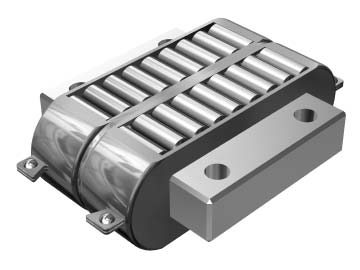
LM Roller
-
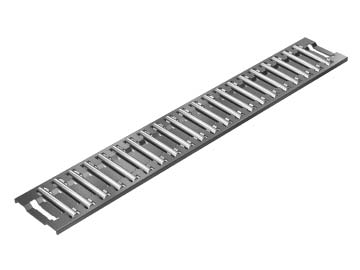
Linear Motion System
Flat Roller
-

Feed Screw - Linear Motion System
Screw Nut
-

Feed Screw - Linear Motion System
Change Nut
-

Linear Motion System
Spline Nut
-

Linear Motion System
Precision Linear Pack
-

Rotation
Link Ball
-

Rotation
Rod End
-

Rotation
Spherical Plain Bearing
-

Others
Lubrication accessories
-

Seismic Isolation
Seismic Isolation









Product News
Links




THK U.K.
Suite W6, Harbour Buildings West, The Waterfront, Brierley Hill, West Midlands DY5 1LN, U.K.
Tel: +44-1384-471550
E-mail: ![]()
