


Sfide e progressi nel pick-and-place dei chip semiconduttori

Immagine 1 : Pick-and-place di chip semiconduttori
Questo articolo fornisce una panoramica dei processi e delle apparecchiature di produzione dei chip per semiconduttori, seguita da esempi di prodotti di uso quotidiano che fanno affidamento su tali componenti. Vengono quindi analizzate le principali sfide legate alla presa dei chip per semiconduttori e vengono introdotti metodi per ridurre al minimo i danni. Sulla base di casi applicativi pratici, viene presentato il Pick-and-Place Robot (PPR) di THK.
Ci auguriamo che questo articolo possa offrire un contributo pratico sia ai giovani ingegneri che si affacciano al settore dei semiconduttori, sia ai professionisti esperti che già affrontano le problematiche associate ai processi di pick-and-place dei chip.
I semiconduttori come tecnologia portante dell’industria
I semiconduttori sono spesso descritti come il "pane quotidiano" dell’industria. La loro importanza si riflette in un’ampia gamma di applicazioni. Le unità di elaborazione centrale (CPU) sono integrate in quasi tutti gli smartphone e computer, e i sistemi moderni utilizzano frequentemente più processori o architetture multi-core per elaborare i dati in modo efficiente. In applicazioni complesse come quelle automobilistiche, vengono impiegate numerose CPU, ciascuna dedicata ad una funzione specifica.
Oltre ai processori, i dispositivi di memoria sono fondamentali, poiché consentono l’archiviazione temporanea o permanente dei dati durante l’elaborazione. Un’altra area applicativa chiave è rappresentata dai sensori: sensori di immagine, fotografici, di accelerazione e di pressione rilevano grandezze fisiche e le convertono in informazioni digitali utilizzate in numerosi prodotti industriali e consumer.
I semiconduttori hanno inoltre influenzato in modo significativo la tecnologia dell’illuminazione. Grazie all’elevata efficienza, alla lunga durata operativa e al design compatto, i LED hanno in larga misura sostituito le sorgenti luminose convenzionali e sono oggi ampiamente utilizzati in ambito automobilistico, infrastrutturale e nei display.
Nel complesso, questi esempi evidenziano il ruolo centrale che i semiconduttori svolgono nella vita quotidiana.
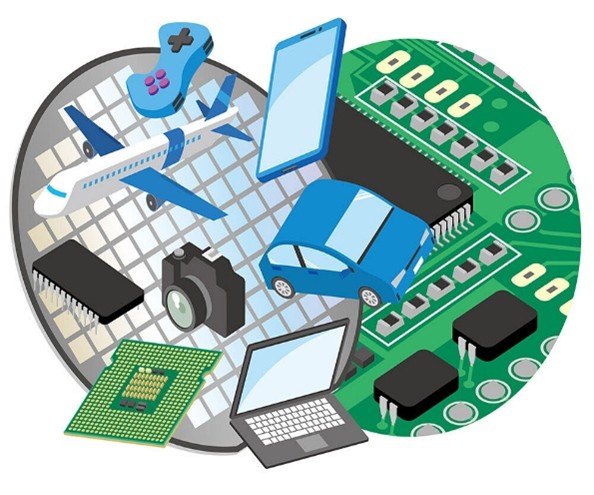
Immagine 2 : Applicazioni dei semiconduttori
Chip semiconduttori e loro processo di fabbricazione
I semiconduttori sono inizialmente realizzati con un materiale a base di silicio¹. Blocchi di silicio monocristallino, noti come lingotti, vengono tagliati in sottili wafer. Questi wafer vengono poi sottoposti a fasi di pre-elaborazione come la modellazione e la separazione dei chip, in cui il wafer viene separato in singoli microchip funzionali. Questi microchip sono chiamati chip o die di semiconduttori. Il termine chip riflette il fatto che si tratta di piccoli pezzi o frammenti del lingotto di silicio più grande, mentre die indica un pezzo di materiale di forma quadrata o cubica, simile a un dado da gioco - da qui il termine separazione dei chip. In questa fase, i die sono separati ma non possono ancora essere utilizzati direttamente in un circuito. Devono prima essere montati su un lead frame polarizzato o su un package semiconduttore: questa fase è detta die bonding, durante il quale il die viene fissato tramite saldatura o incollaggio.
Nel successivo processo di wire bonding, il die viene collegato elettricamente al lead frame o al package tramite sottilissimi fili metallici. A questo punto, sia i fili che la superficie del chip per semiconduttore sono esposti e richiedono un'attenta manipolazione. Per garantire protezione meccanica e stabilità, nella fase successiva viene applicata una resina (molding) che forma un incapsulamento protettivo.
(1) Possono essere utilizzati altri materiali
(2) Esiste anche una tecnica nota come flip-chip bonding.
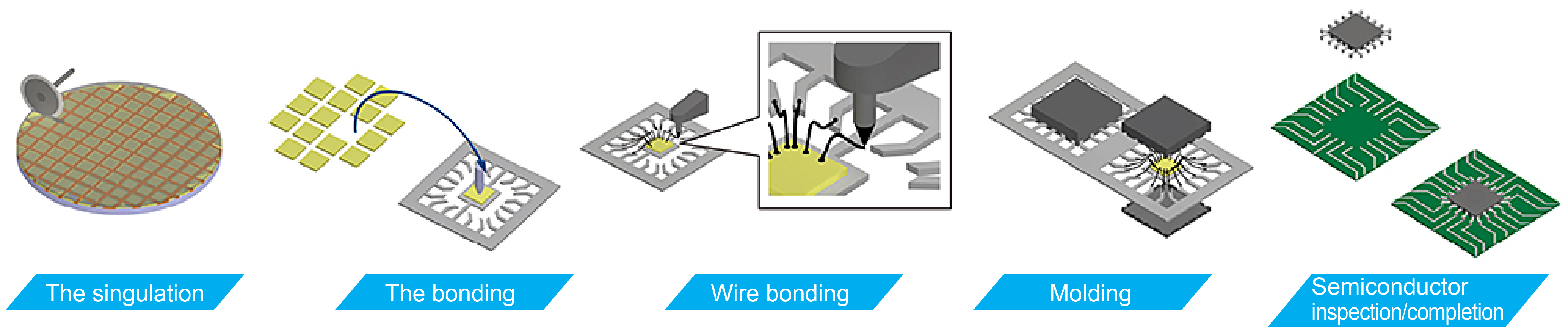
Immagine 3 : Processo di produzione dei semiconduttori
Tra i vari macchinari impiegati in queste fasi di lavorazione vi sono i dicer per la separazione dei die (singulation), i die bonder per il posizionamento dei microchip, i sorter³ per la pre-selezione dei die prima del die bonding e i wire bonder per la saldatura a filo.
(3) I sorter possono scartare i chip identificati come difettosi durante i test
Sfide nella movimentazione dei chip semiconduttori
Torniamo ora ai processi in cui i wafer vengono separati in singoli chip e questi vengono successivamente prelevati. Durante la singulation dei die, i wafer vengono fissati a un nastro adesivo per evitare che i chip si disperdano durante il taglio. Al termine del processo di taglio, i chip separati dal wafer vengono afferrati da uno strumento di presa e sollevati dal nastro adesivo.
A causa delle proprietà fisiche del silicio, anche urti minimi possono provocare danni o micro fratture. Ciò comporta il rischio di danneggiare i chip che hanno già superato con successo le fasi di lavorazione precedenti. Per ridurre tale rischio, il nastro adesivo fissato al wafer viene teso e dei perni di espulsione sollevano i chip uno alla volta dal basso. Questo permette agli strumenti di presa di staccare i chip dal nastro adesivo in una maniera più facile e delicata.
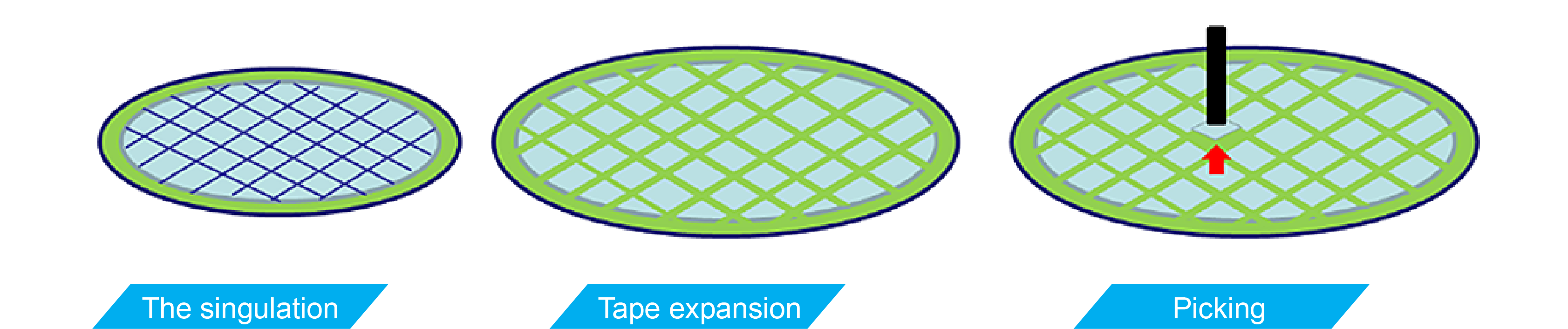
Immagine 4 : Espansione del nastro e sollevamento dei chip con uno strumento di presa
Il sollevamento dei chip mediante perni di espulsione facilita la rimozione del nastro adesivo; tuttavia, richiede un’implementazione estremamente precisa e tecnologicamente avanzata. I seguenti fattori rendono questo processo particolarmente complesso:
1. I chip presentano uno spessore molto ridotto e sono altamente sensibili alle sollecitazioni meccaniche.
2. I perni di espulsione e gli strumenti di presa devono essere sincronizzati con estrema precisione sia temporalmente sia spazialmente.
3. L’usura può causare disallineamenti dei perni di espulsione e dei colletti⁴ rispetto ai chip.
4. Nel settore dei semiconduttori e dei componenti elettronici, l’ugello di aspirazione è comunemente denominato colletto (collet).
Esaminiamo in dettaglio ciascun fattore che causa delle complicazioni nel processo.
1. Cips estremamente sottili e sensibili
Come accennato in precedenza, i lingotti vengono tagliati in sottili fette per produrre i wafer semiconduttori. Quanto più questi wafer sono sottili, tanto maggiore è il numero di wafer ottenibili da un singolo lingotto, con conseguente riduzione del costo per wafer. Inoltre, componenti semiconduttori più piccoli e più sottili richiedono minore superficie e volume quando vengono montati su un circuito stampato. Tutto ciò contribuisce a rendere il dispositivo elettronico finale più compatto e il prodotto finito più pratico e facile da usare.
Sebbene molti chip vengano assottigliati fino a uno spessore compreso tra 0,5 mm e 1,0 mm per ragioni di resistenza meccanica e di maggiore facilità di manipolazione, alcuni chip allo stato dell’arte possono raggiungere uno spessore di circa 20 µm.
2. Movimento sincronizzato del pin di espulsione e dell’utensile di prelievo
Il pin di espulsione viene movimentato verso l’alto dal lato inferiore di un wafer mediante un servomotore o altro meccanismo di azionamento. Analogamente, il colletto (collet) dell’unità di pick-and-place è azionato da un servomotore o da un attuatore equivalente, ma si muove verso il basso. La sequenza operativa per il prelievo di un chip semiconduttore è la seguente:
1. Il colletto viene abbassato fino al chip con vuoto applicato.
2. Il pin di espulsione viene sollevato.
3. Il pin di espulsione e il colletto vengono sollevati simultaneamente.
4. Il colletto prosegue il movimento verso l’alto ed effettua il prelievo del chip.
Durante questo processo, il chip è sottoposto sia a sollecitazioni dovute al contatto con il colletto e con il pin di espulsione, sia a forze derivanti dal serraggio tra questi due elementi. Per ridurre il rischio di danneggiamento di questi dispositivi così sottili, sono richiesti un controllo di posizione altamente accurato, un controllo della velocità e una sincronizzazione estremamente precisa del moto lungo l’asse verticale.
Dalle nostre analisi risulta che anche un serraggio dell’ordine di alcune decine di micrometri può generare carichi di diverse centinaia di grammi, rendendo imprescindibile un controllo rigoroso della posizione.
3. L’usura può alterare il posizionamento relativo tra il pin di espulsione, il colletto e il chip
I pin di espulsione e i colletti entrano in contatto con i chip migliaia, se non decine di migliaia di volte ogni giorno, causando un’usura progressiva nel tempo. Per contrastare tale fenomeno, per questi componenti vengono impiegati materiali ad elevata durezza, come metalli temprati e persino diamante.
Nonostante ciò, le estremità di tali elementi possono deformarsi, con conseguente variazione del loro posizionamento relativo rispetto ai chip. Questa alterazione può determinare sia errori nel processo di espulsione, sia danneggiamenti dei chip manipolati.
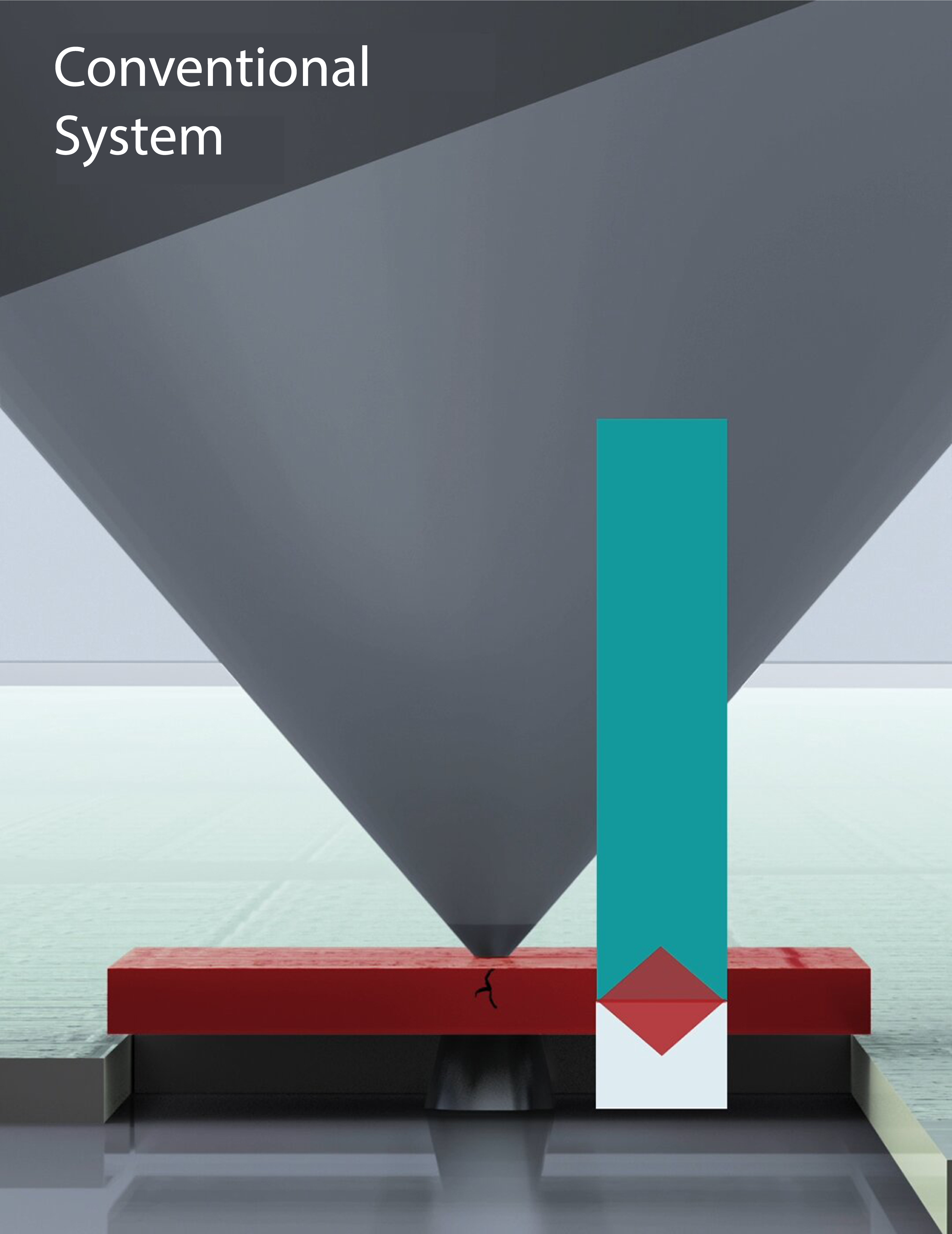
Immagine 5: Carichi d’impatto causati da inceppamenti dovuti alla mancanza di capacità di regolazione durante il sollevamento mediante il pin di espulsione
Vantaggi del robot Pick and Place, PPR
In quanto sistema integrato, il PPR è dotato di motore lineare ed encoder per l’asse Z, nonché di sensore di forza, risultando pertanto particolarmente idoneo a un’ampia gamma di processi di prelievo di chip semiconduttori.
Grazie a una funzione di arresto al contatto (contact-stop), che si attiva non appena il colletto entra in contatto con il chip, il PPR consente di ridurre il carico d’impatto applicato al chip. La medesima funzione è inoltre in grado di mitigare eventuali variazioni dell’intensità di tale carico, ad esempio quelle derivanti da variazioni di posizione del colletto causate dall’usura. Poiché il PPR è in grado di acquisire informazioni di posizione con risoluzione dell’ordine del micrometro, esso può anche rilevare fenomeni di usura del colletto, verificando la posizione dello stesso nel preciso istante in cui entra in contatto con il chip.
Un caso studio relativo a una soluzione proposta, in cui la determinazione dell’altezza viene effettuata mediante informazioni di posizione, è disponibile alla pagina dedicata.
Utilizzando la funzione di controllo della forza di pressing del PPR per la sincronizzazione con i pin di espulsione, è possibile mantenere costante un carico predefinito sui chip prelevati. Ciò consente di evitare, durante la fase di sollevamento, carichi d’impatto superiori al valore impostato, anche nel caso in cui il movimento lungo l’asse verticale non sia sincronizzato con elevata precisione.
Un ulteriore caso studio, relativo a una soluzione proposta che illustra il comportamento dei sensori di forza impiegati nel controllo della forza di pressing, è anch’esso disponibile alla pagina dedicata.

Immagine 6: Assorbimento degli urti mediante l’eliminazione di forze sovrapposte durante il sollevamento del chip
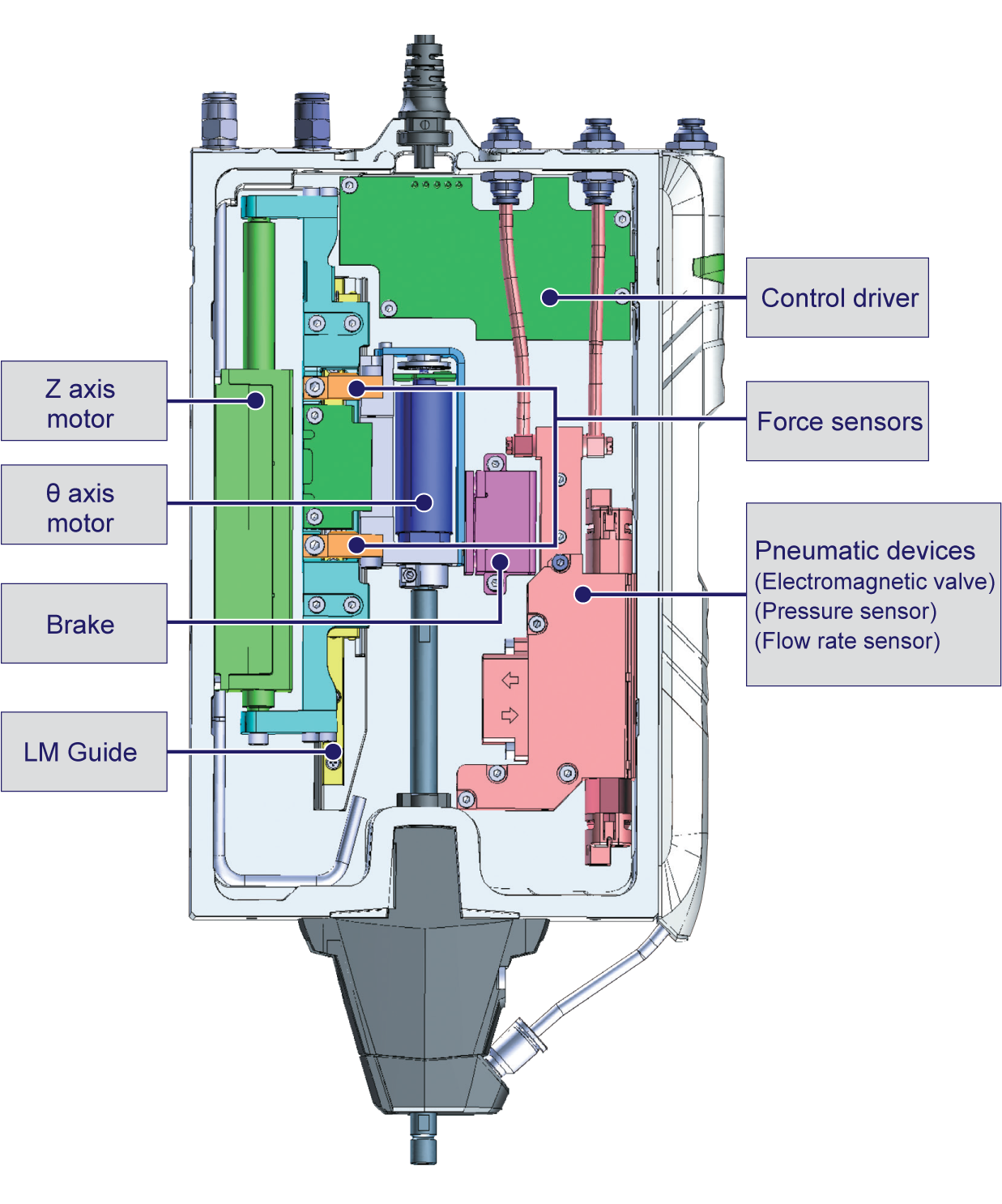
Immagine 7: La struttura del robot Pick and Place, PPR
Incremento della resa nei processi di produzione di semiconduttori
In questo articolo l’attenzione è stata posta sulle modalità di prelievo dei chip semiconduttori durante le fasi di processo. Sono state analizzate sia le criticità legate alla prevenzione dei danneggiamenti, sia le opportunità di miglioramento del processo rese possibili dal Pick and Place Robot (PPR). Come illustrato nella prima parte di questo articolo, i semiconduttori rappresentano un elemento fondamentale delle tecnologie moderne. Con il continuo aumento delle prestazioni richieste a dispositivi quali gli smartphone, emerge parallelamente l’esigenza di realizzare semiconduttori sempre più compatti e sottili. Tuttavia, i riscontri provenienti dagli utilizzatori indicano che numerosi costruttori di impianti e macchinari si trovano ad affrontare sfide tecniche rilevanti in questo ambito.
Si ritiene che il PPR, in combinazione con altre tecnologie THK, possa contribuire in modo significativo ad affrontare tali criticità e a supportare l’ulteriore evoluzione dei processi nel settore dei semiconduttori.
Per ulteriori informazioni o supporto tecnico, si prega di contattare THK.
THK GmbH
PR Group
Kaiserswerther Strasse 115,
40880 Ratingen, Germany
Tel: +49 2102 7425 555
E-mail: press@thk.eu
www.thk.com