Jan 29, 2025
Products
Precise Positioning with Shorter Settling Times: Leveraging the Rolling Spring Effect of the LM Guide
- Technical explanation
- General Industrial Machinery
- Machine Tools
- Industrial Robots
- Semiconductor Manufacturing Equipment
- Conveyance
- High Accuracy
- High Speed
- LM Guide
Positioning technology is a crucial element of manufacturing. The ability to quickly and accurately stop at a specified position is particularly important for production floors that require precise position resolution. Here, the concept of “settling time” is key. Settling time is the time the machine spends repeatedly making minute adjustments before it reaches its target position. Because long settling times drastically impact product quality and processing efficiency, shortening them is crucial. In this article, we’ll take a deeper look at control technology used to shorten settling times in precision positioning systems that make use of the LM Guide.
Control Gain Adjustments
Control gain* adjustments are one way of shortening a positioning system's settling time. When an LM Guide is used, settling time can be reduced by applying a large control gain while the machine is moving at low speed just before it stops. Normally, applying a large control gain in this fashion would generate vibrations and diminish stability. When an LM Guide experiences minute motion, however, what’s called the rolling spring effect comes into play. This facilitates stable positioning responses by preventing vibrations and overshooting even when a large gain is applied.
* A gain value indicates how much an electrical signal is amplified based on the amplification magnitude of an electric circuit.
Leveraging the Rolling Spring Effect for Increased Productivity
The rolling spring effect refers to the elastic deformation experienced by the balls or rollers of an LM Guide as they roll. Specifically, when the balls or rollers make contact with the rail, they become ever so slightly deformed. The force that acts to reverse that deformation and return the balls or rollers to their original shape acts like a spring, hence the name of this special characteristic of the LM Guide. The rolling spring effect is a very important consideration for design and product selection, as it affects the rigidity and accuracy of an LM Guide. Naturally, leveraging it produces considerable results for sectors of the manufacturing industry that require precision positioning technology. Each of the control methods described below constitutes a technology that leverages large gain values for sustained accuracy and reduced settling time, providing a particularly potent boost to the productivity of applications that require frequent positioning.
Starting with a Step Response Experiment
In order to validate the rolling spring effect as a positioning technology, we performed an experiment using the deviation between step function inputs and the corresponding step responses.
The two figures below show a 10 μm step response obtained from a single-axis positioning control system featuring an LM Guide. Both use a resolution of 1 μm for their position measurements.
Figure 1 shows the responses obtained with a position proportional gain (Kp) of 60 s-1.
The responses resemble those of a first-order lag system (a type of system that shows the changes that happen in a transient state). With an ideal rigid body system, composed of objects that do not deform regardless of how much force is exerted on them, a time constant of approximately 16 ms should be attainable given sufficiently fast speed control. Here, however, the time constant is an extremely slow 150 ms. This is due to the nonlinear friction characteristics of the LM Guide.
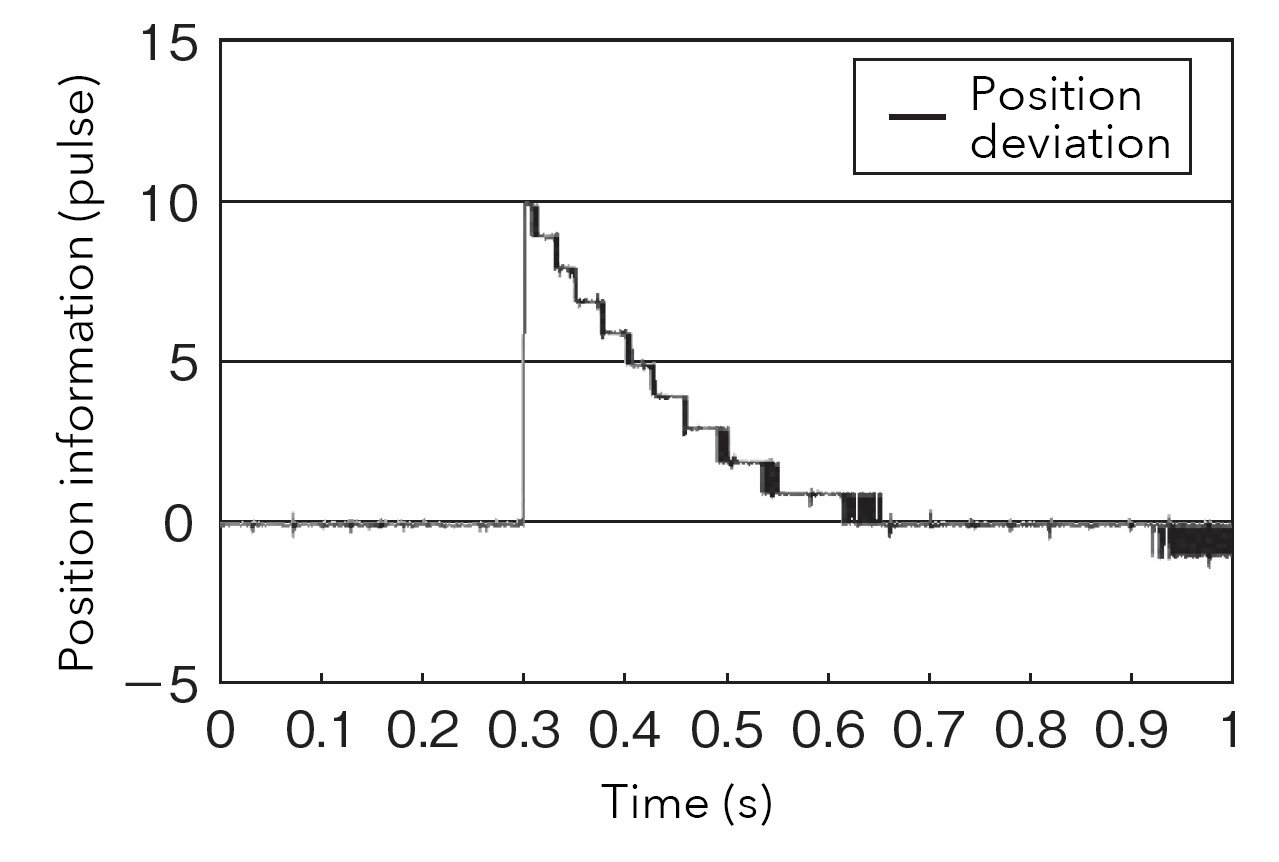
Figure 2 shows the responses obtained from the same system with the position proportional gain (Kp) set to the extremely high value of 1,000 s-1.
It’s impossible to make the gain value this large in a normal system, as it would cause extraordinary amounts of vibration or cause the system to become unstable. Regardless, in this case, it resulted in responses that were at least 10 times faster. Furthermore, the graph shows a clean response profile free of vibration and overshoot.
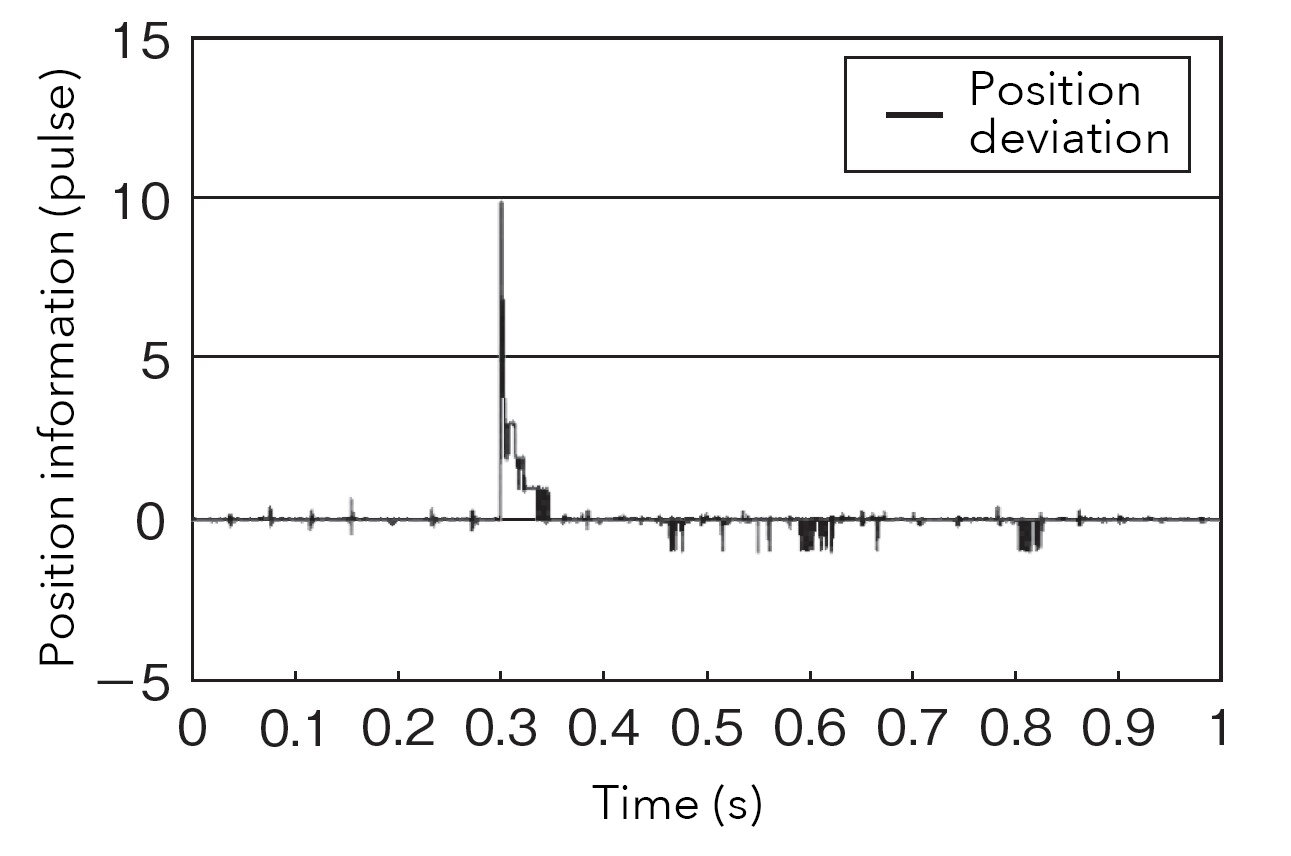
For positioning devices that use the LM Guide, applying the same control gain during minute movements as is applied during large-amplitude operations produces slower responses. Far faster and no less favorable responses can be obtained, however, by applying a substantially larger position proportional gain for those minute movements.
The fundamental principle at work here is the rolling spring effect mentioned above, which comes into play when the motion of an LM Guide changes direction. This rolling spring effect produces an extraordinarily stiff spring characteristic with a spring constant of approximately 10 N/μm. While its effective range is only a few microns, this characteristic makes a decisive difference when it comes to settling time in a positioning system.
We’ve demonstrated that the method outlined above can reduce settling times by a factor of ten. For processes that involve frequent positioning, this should yield substantial increases to productivity.
Comparing the Settling Time Responses from Three Different Control Methods
We also performed an experiment to compare the settling time responses for positioning performed with three different control methods.
The three responses we compared were obtained from the following control methods.
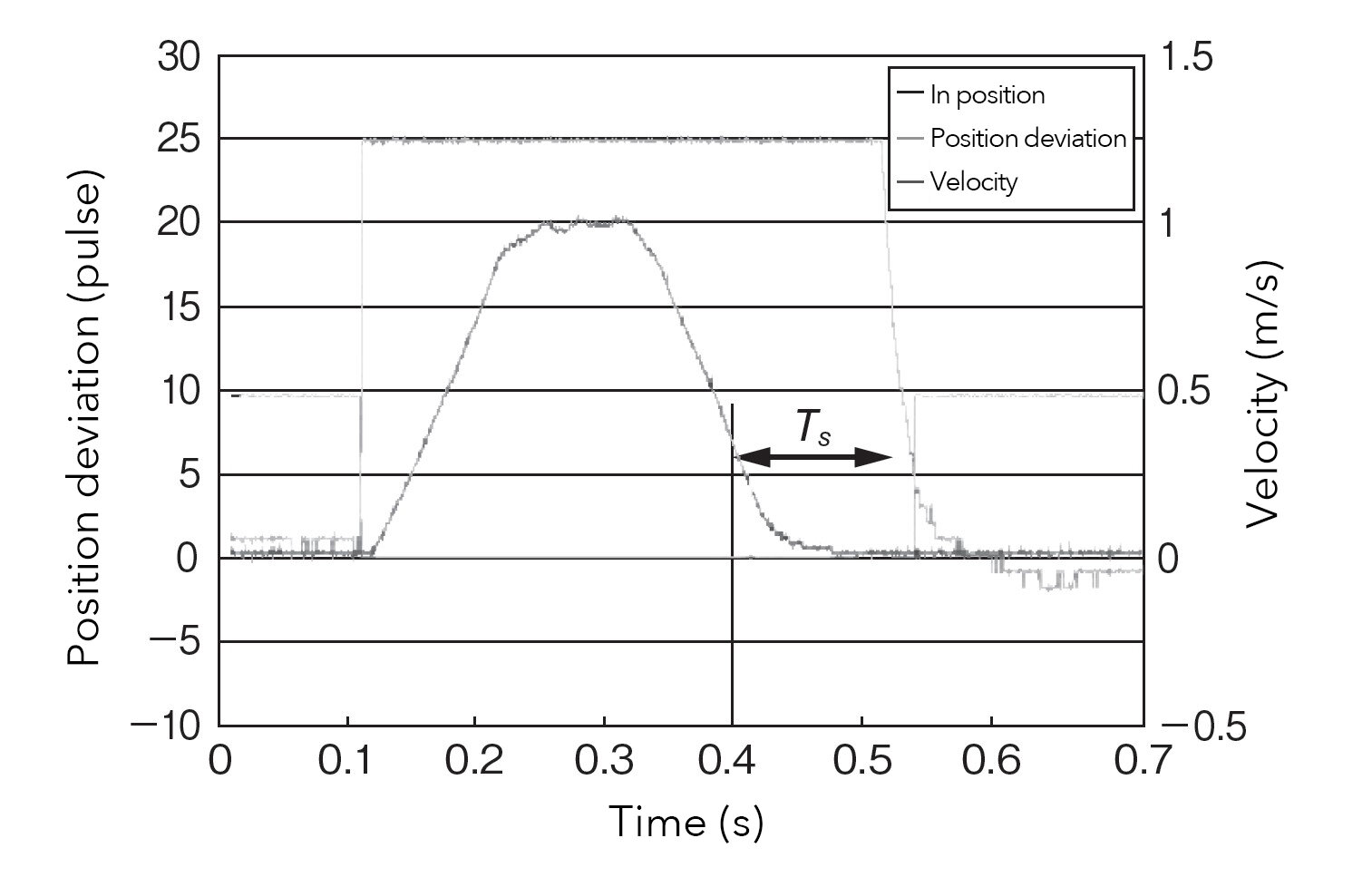
1. Conventional control method (P, PI: Closed loop control)
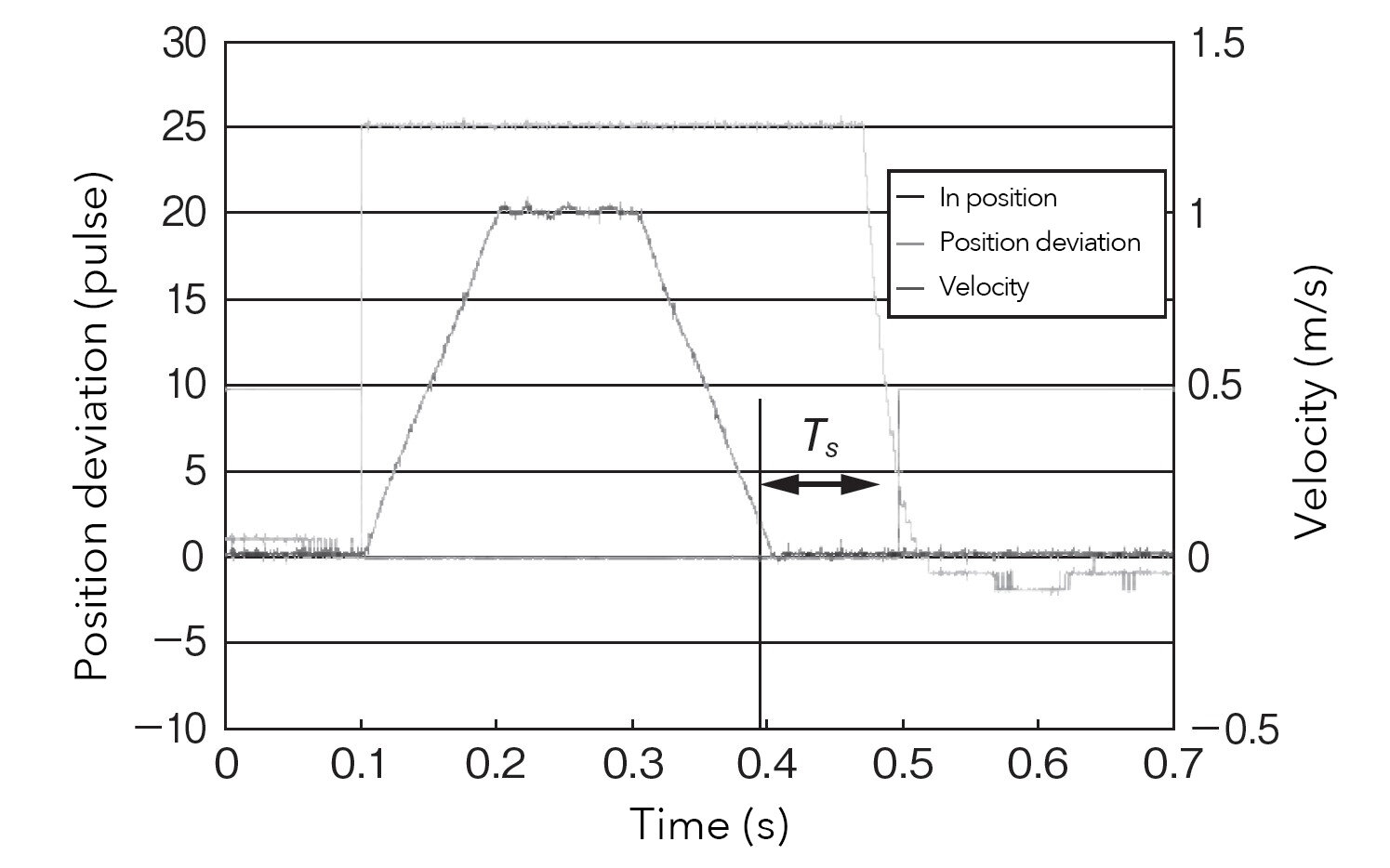
2. Velocity feedforward control (P, PI: Closed loop control with velocity feedforward control)
3. THK’s newly proposed method of applying a high control gain when there is little position deviation
The conventional control method (P, PI: Closed loop control) had the following specifications.
Closed loop control uses the values P (position) and PI (velocity).
Position proportional gain (Kp): 60 s-1
Velocity proportional gain (Kv): 250 s-1
Integral time (Ti): 20 m
The closed loop control methods were tested under the following conditions.
Motion command pattern (trapezoid)
Stroke: 200 mm
Acceleration/deceleration: 10 m/s2
Acceleration/deceleration time: 0.1 s
Fixed velocity: 1 m/s
Fixed velocity time: 0.1 s
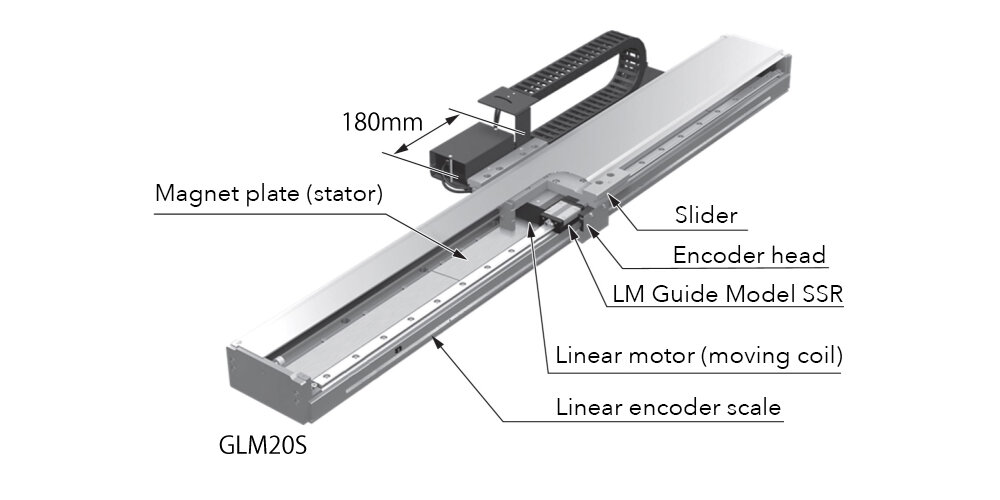
The single-axis positioning equipment that was used for the experiment (Model GLM20S) had the following specifications.
Equipment specifications:
Stroke: 1 m
Maximum velocity: 1 m/s
Positioning resolution: 1 μm
The LM Guide Model SSR20 (with ball cage) used by the single-axis positioning equipment
The details for the commands issued in the experiment are as follows.
Command signals ended 0.3 seconds after starting.
Two ranges were used to register that positioning was complete, one that allowed a deviation of ±5 pulses and another that allowed a deviation of ±1 pulse.
Each pulse corresponds to 1 μm.
The positioning settling time represents the duration between when the command signal ended and when the device stopped inside each of the positioning complete ranges.
Experimental Results
The three control methods produced the following positioning settling times (in milliseconds).
| 1. Conventional control (P, PI) | 2. Velocity feedforward | 3. THK’s newly proposed control method | |
|---|---|---|---|
| ±5 pulses | 123 | 98 | 8.2 |
| ±1 pulse | 262 | 279 | 16.4 |
Let’s compare the three response trends we obtained from the experiment.
1. With the conventional conditions of P, PI Control with Kp = 60 1/s
2. With the addition of 100% velocity feedforward
3. With THK’s newly proposed control method
Positioning settling time was drastically reduced.
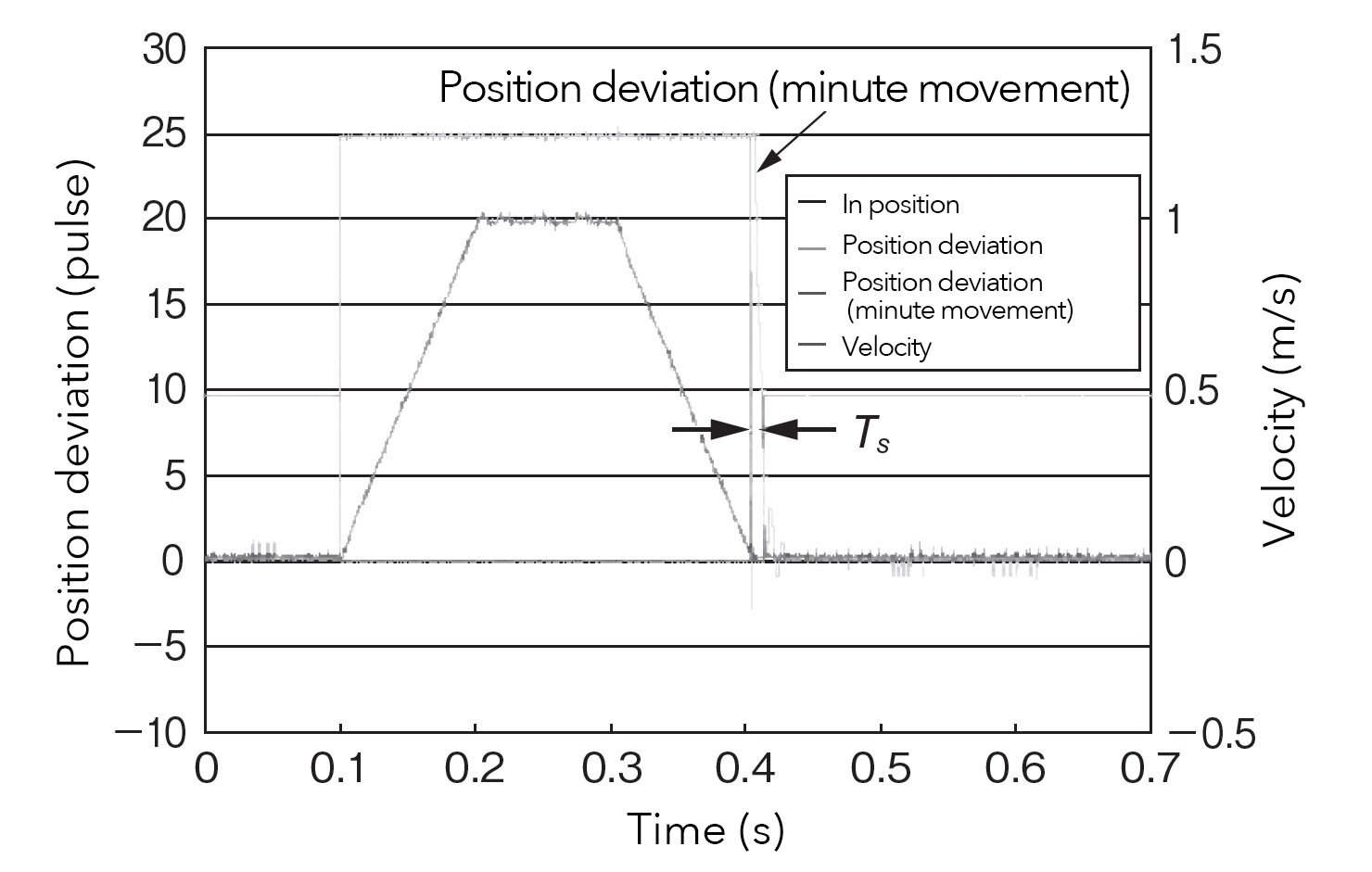
Incredibly, THK’s newly proposed control method reduced settling time to less than a tenth of what we saw from the other control conditions. The results of this experiment help demonstrate that this method would have a tremendous impact in applications that involve frequent positioning.
* This Product Journal article was adapted from this essay, which was published in the October 2024 volume of Machine Design (published by Nikkan Kogyo Shimbun). (Available in Japanese only.)
Essay title: Linear Ball Guides in Precision Positioning Systems: Positioning Settling Times Shortened by the “Rolling Spring Effect”
Author: Shigeru Futami (Technical Advisor, Engineering Division, THK; Doctor of Engineering, Tokyo Institute of Technology)
* This content is based on information that was released in Japanese on January 29, 2025.