回転モジュール
回転モジュール「RMR」は、剛性に優れたTHK製のクロスローラーリングを回転機構の主軸受とし、さらにロボットの関節部には欠かせない減速機、モータ、エンコーダ、ブレーキなどの要素を一体化した、ロボットの関節機構に適したアクチュエータです。ロボットの関節部に必要なメカ要素がすべて備わっているため、そこにアーム部品や直動モジュールを自由自在に組合わせることで、幅広い設備に適したお客様独自のロボット設計が可能となります。

種類

特長
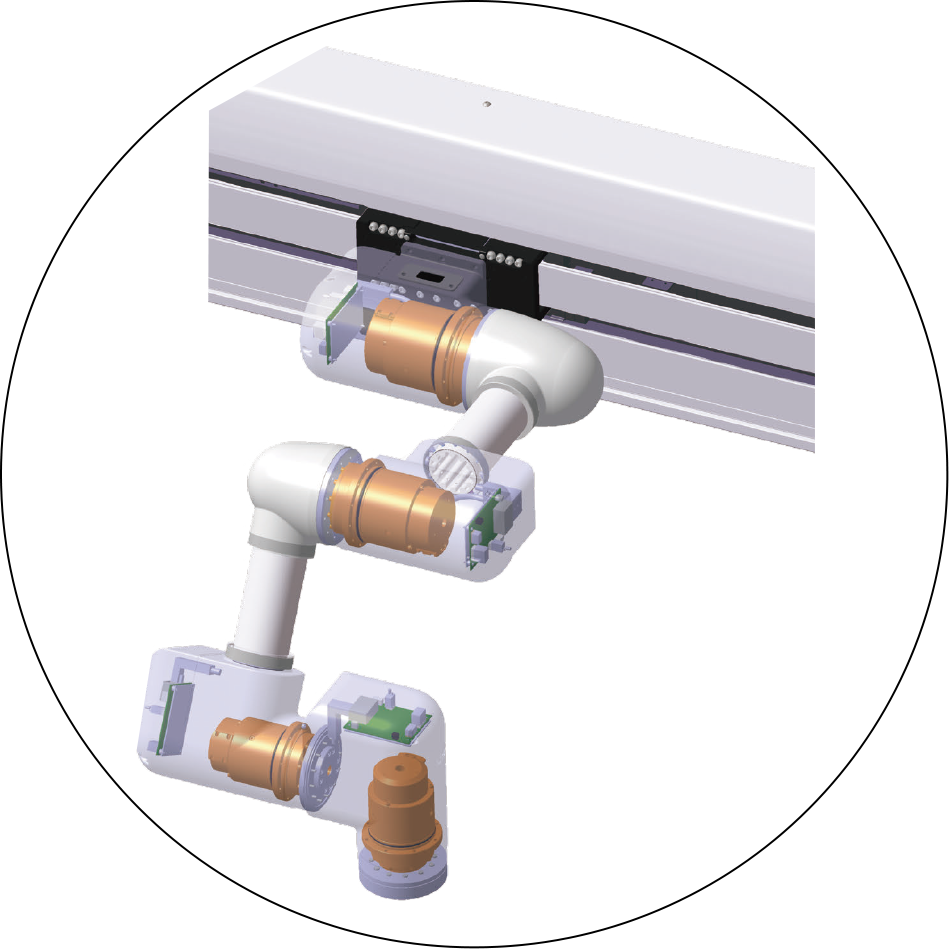
構造と特長

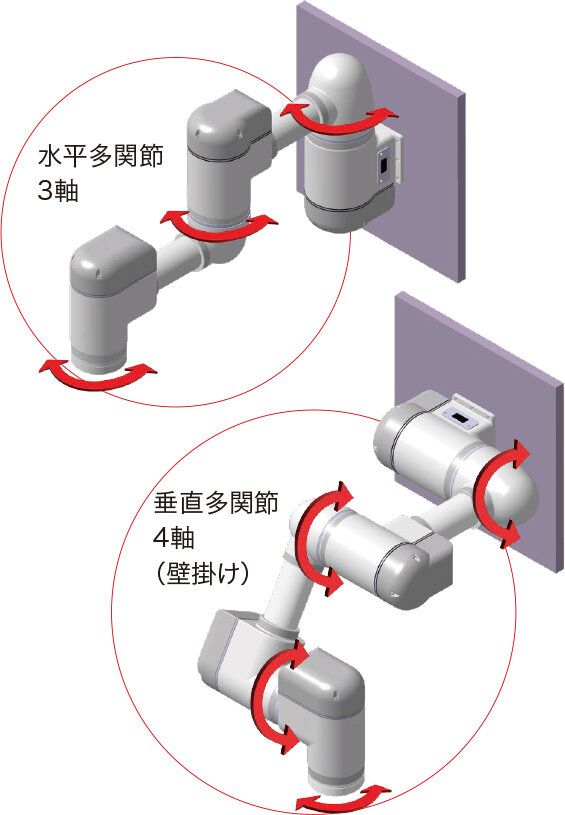
複数の回転モジュールとアーム部品を組合わせることによりロボットを自由に構成できます。
特長① 一体型モジュール
減速機、モータ、エンコーダ、ブレーキをモジュールとして一体化することにより、部品選定・設計・組立にかかる工数を削減可能です。
特長② 高許容モーメント
THK製クロスローラーリングを主軸受に採用することで、大きなモーメントを負荷することが可能です。
特長③ 中空構造
ケーブルやチューブを通すことができる中空構造のため構造の簡略化や省配線化が可能です。
特長④ ドライバ別置き
ドライバをモジュールとは別置きとすることで、モジュール全長を小型化しました。また、モジュールおよびドライバの配置の自由度が向上します。
組み合わせ例
複数の回転モジュールとアーム部品を組合わせることによりロボットを自由に構成できます。
基本仕様
回転モジュールRMRの基本仕様を示します。
| 形番 | RMR10 | RMR30 | RMR50 | RMR70 | |||||
|---|---|---|---|---|---|---|---|---|---|
| 減速比 | 1/101 | 1/101 | 1/81 | 1/51 | 1/101 | 1/81 | 1/51 | 1/101 | 1/51 |
| 瞬時最大トルク[N・m] | 32 | 63 | 50 | 44 | 96 | 86 | 73 | 163 | 127 |
| 定格トルク[N・m] | 9 | 28 | 26 | 21 | 47 | 40 | 28 | 70 | 51 |
| 定格回転速度[度/s] | 180 | 90 | 120 | 180 | 90 | 120 | 180 | 90 | 150 |
| 静的許容モーメント[N・m] | 74 | 124 | 187 | 258 | |||||
| ブレーキ保持トルク(入力軸)[N・m] | 0.62 | 1.32 | 3.2 | 3.2 | |||||
| 質量[kg] | 1.7 | 2.4 | 3.1 | 4.5 | |||||
| 電源電圧 | DC48V | ||||||||
| エンコーダ方式 | ABS | ||||||||
| エンコーダ分解能(入力軸) | 17bit | ||||||||
| IP対応 | IP54相当 | ||||||||
| 使用環境 温度 | 0~40℃ | ||||||||
| 使用環境 湿度 | 90%RH以下 | ||||||||