

従来の搬送
人手による作業
・サイズの大きい様々な部品を持ち上げている
・本当はロボットによる⾃動化をおこないたい。

ロボットによる作業
・多品種生産には、段取り替えの時間が必要
・形状が複雑なため、吸着がうまくいかない
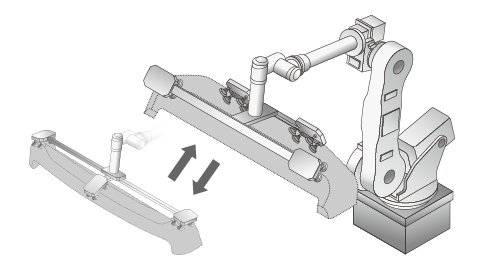
サイズが大きい部品でも、段取りせずにピックアップしたい
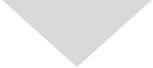
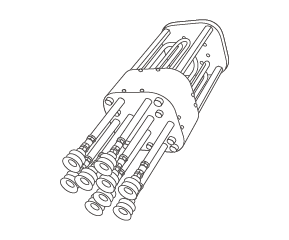
次世代マルチ吸着ハンドが解決いたします!

複雑な形状にフィット
・シャフトが固定され、姿勢を維持
・安定したピッキングで生産性向上
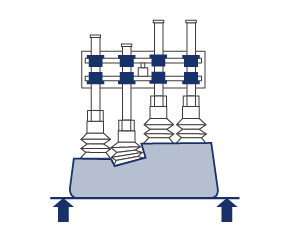
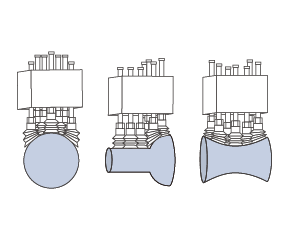
段取りレス
・品種変更時もハンド交換不要
・専用ハンド交換の段取り時間を削減
装置構成のシンプル化
・コンパクトかつ軽量な構成
・ハンド設計の工数を削減
次世代マルチ吸着ハンドは、専用ハンド交換の段取り時間を削減します。
導入相談・費用についてお気軽にお問い合わせください
ソリューション営業本部 9:00~17:00(土日祝日除く)