Vis à billes cannelée à faible inertie BNS-V
Vis à billes cannelée à faible inertie BNS-V
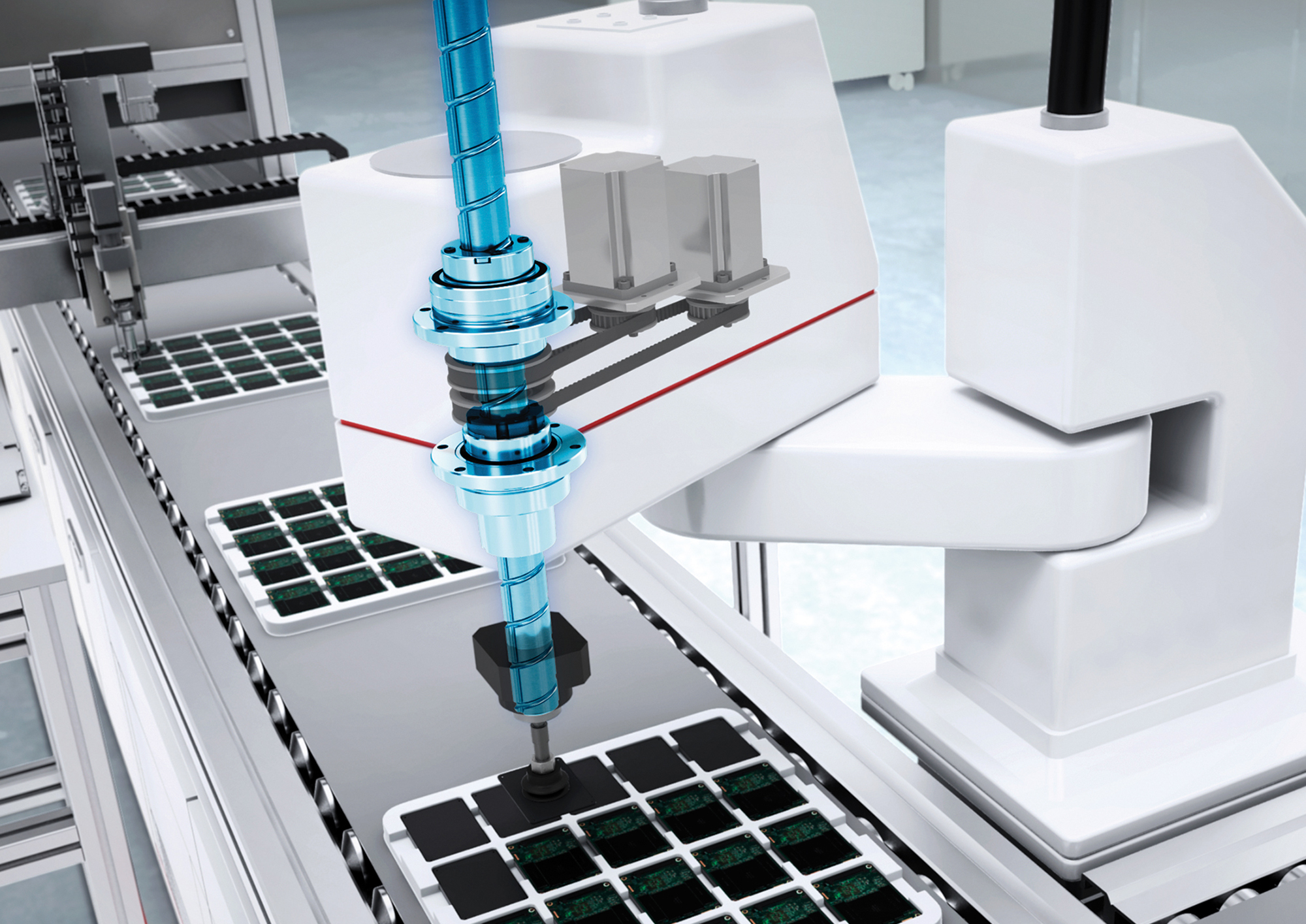
Exemple d’un robot SCARA équipé d’une vis à billes cannelée BNS-V
Les utilisateurs de robots articulés horizontaux recherchent des axes Z à faible inertie pour augmenter les cadences de fonctionnement.
Réduire le diamètre extérieur des écrous tout en conservant le même diamètre d’arbre permet une diminution de la masse embarquée, ainsi qu’une augmentation des cadences. En conjonction avec une conception adjacente plus compacte, donc plus légère, les sollicitations sur les moteurs diminuent, ce qui optimise le bilan thermique et permet au robot de fonctionner de manière plus intensive et avec une plus longue durée de vie.
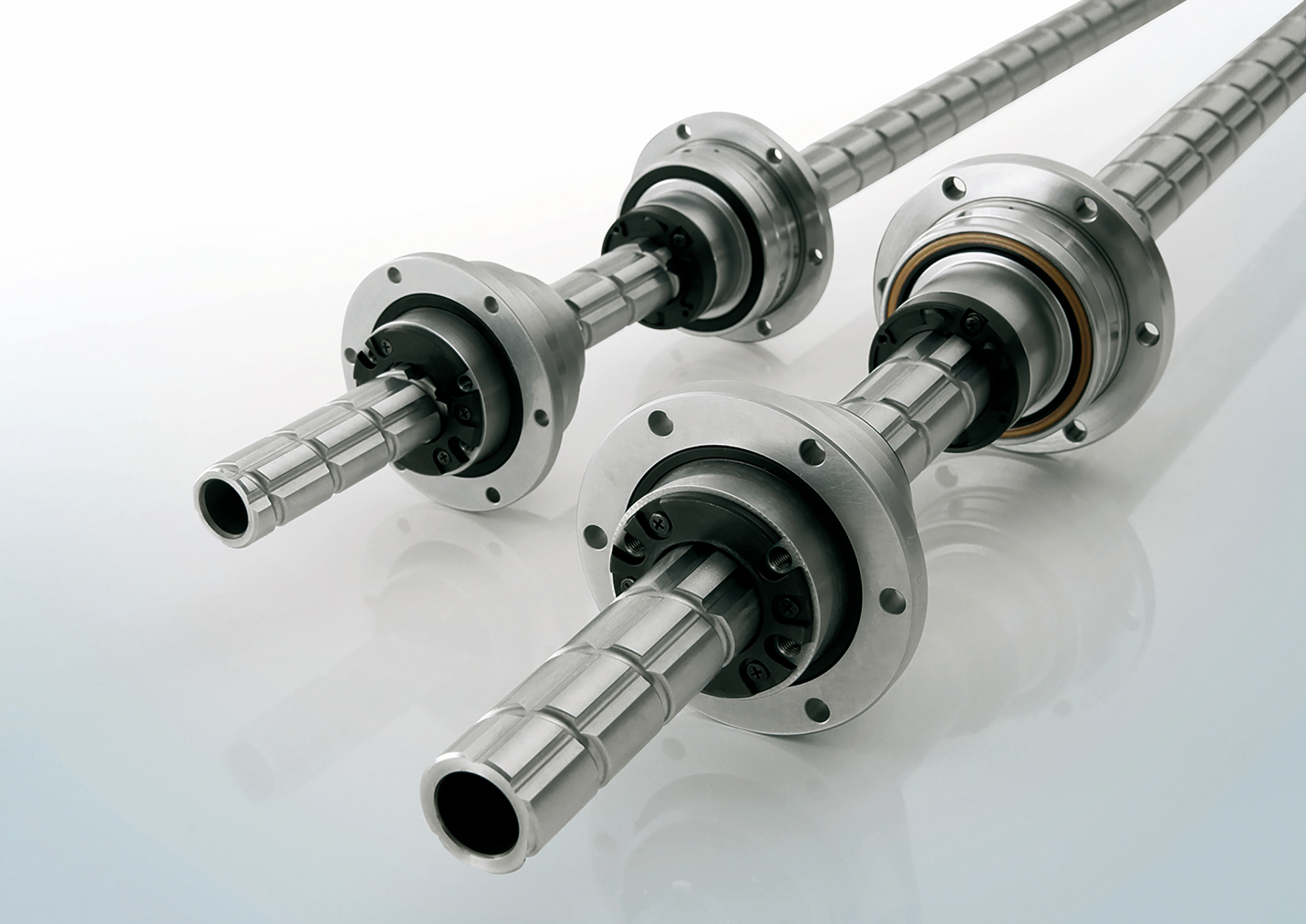
La BNS-V est un produit combinant un écrou de vis à billes et un écrou d’arbre cannelé à billes, tous deux montés sur un arbre doté de pistes de roulement hélicoïdales et longitudinales (cannelures). Cette vis à billes cannelée permet d’imposer à l’arbre trois types de mouvement (rotation, linéaire et hélicoïdal) en combinant les vitesses de rotation de chaque écrou.