

PPR-LR3-LF1
(position control only model)

| Features | PPR-LR3-LF1 (position control only model) |
|---|---|
| Z axis stroke | 30mm |
| Z axis resolution | 1μm |
| Θ axis stroke | 360° |
| Θ axis resolution | 0.01° |
| Portable mass | 80g |
| Thickness | 15mm |
| Force sensor resolution | - |
| Integrated pneumatic module | yes |

Position Control Pick and Place Applications
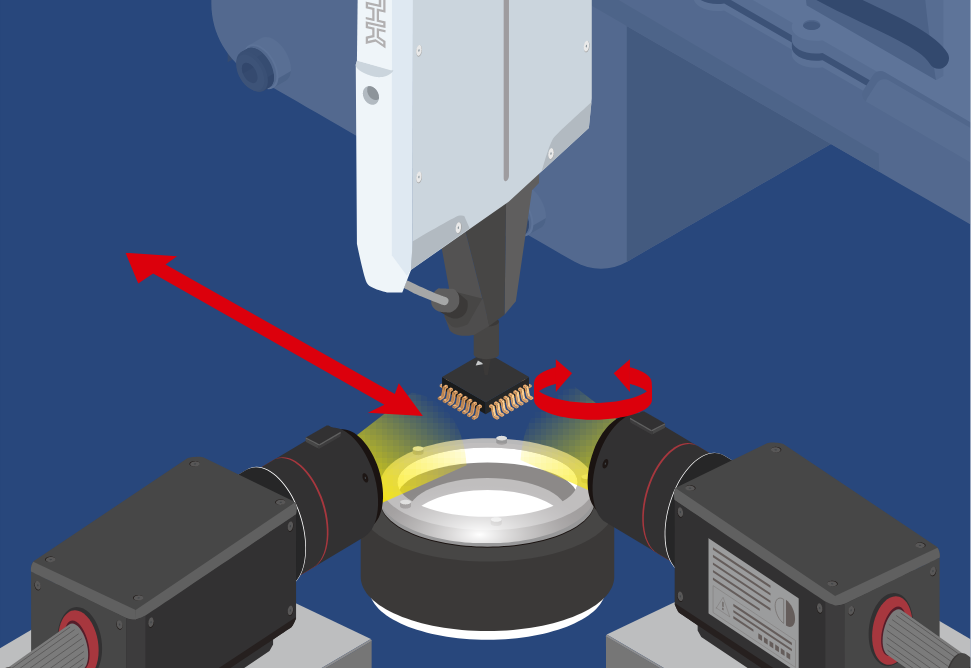
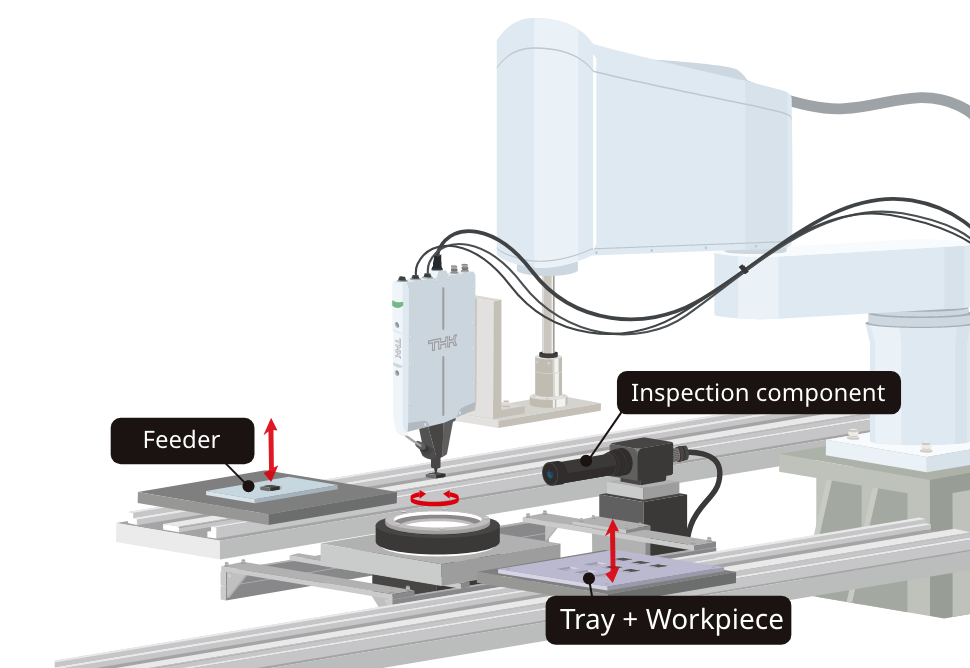
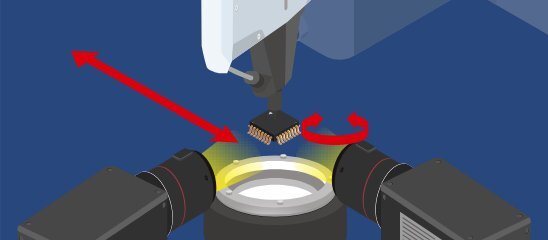
Inspection process
SCARA robot
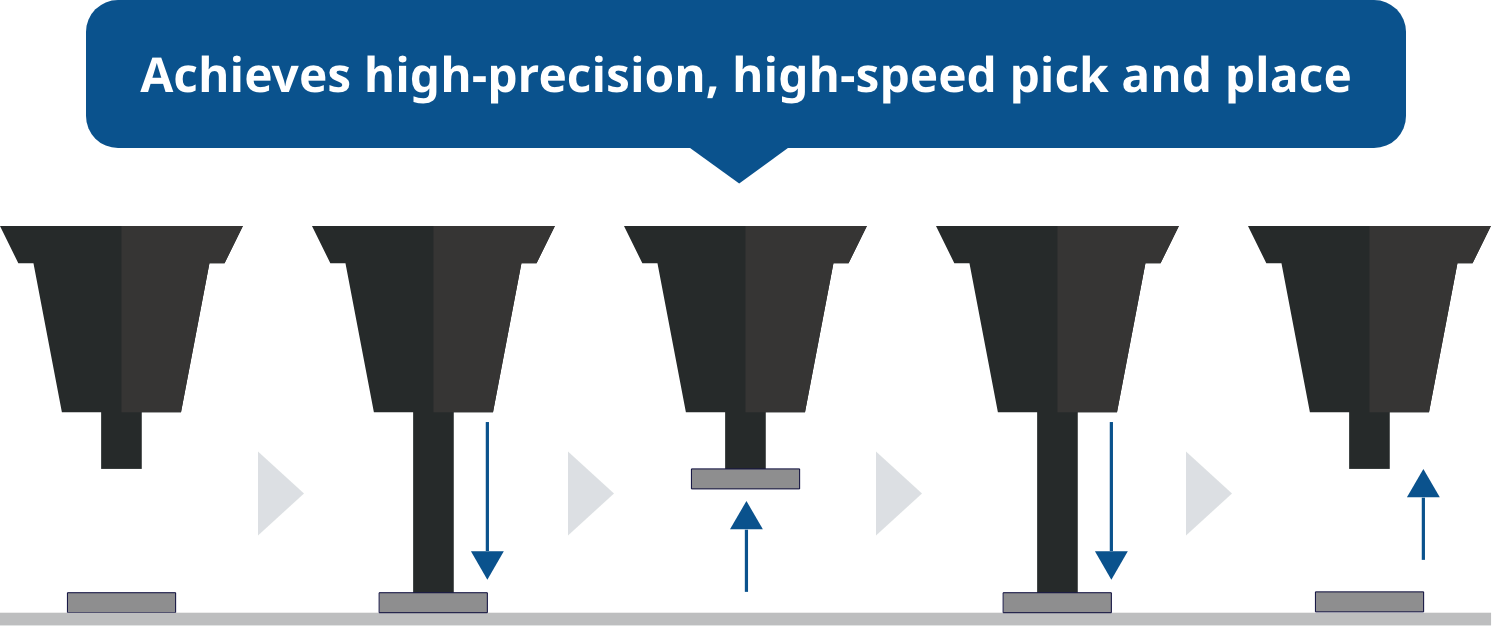
Five pick-and-place cycles per second are possible with a 5 mm stroke!
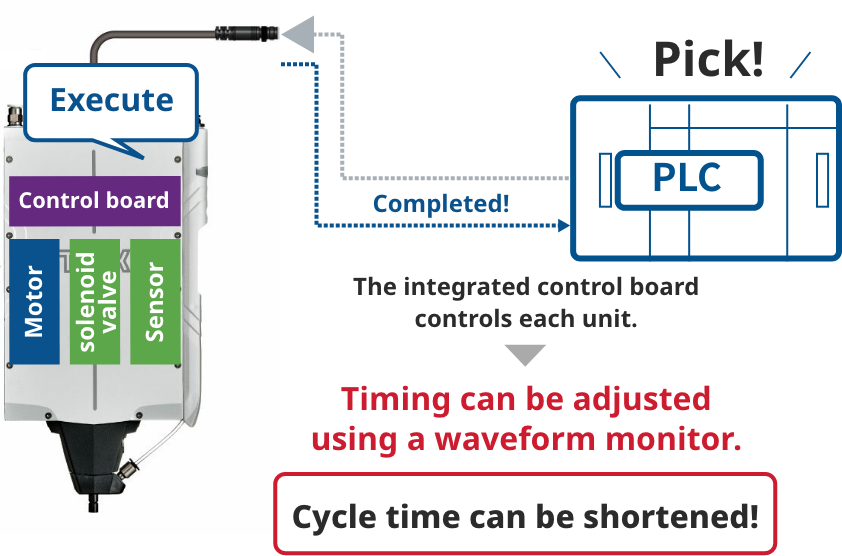
Cycle time can be adjusted by confirming the waveform!
Furthermore, it can judge suction errors even at this speed!
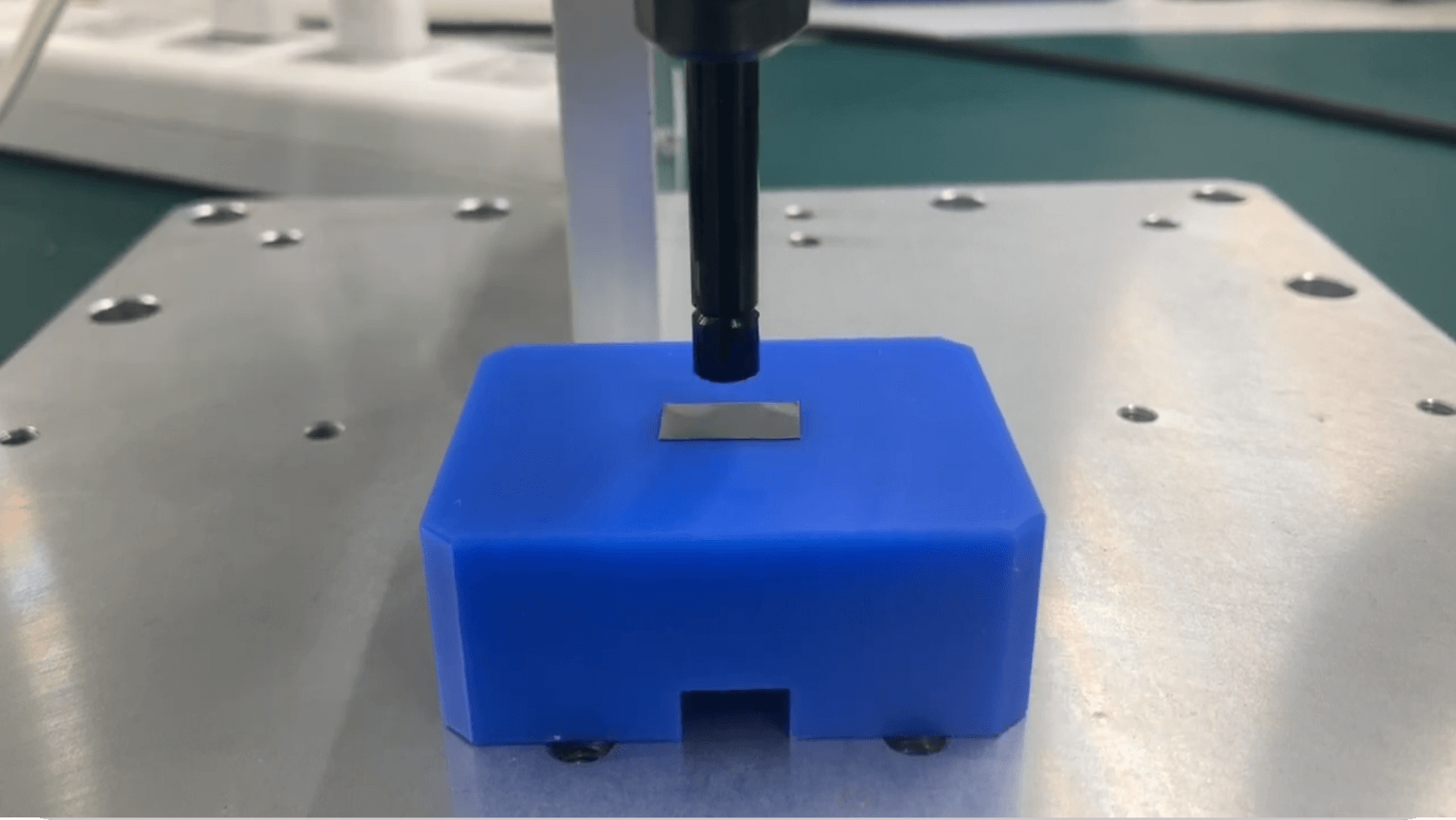
PPR: Video of position control
high-speed pick and place
Please feel free to
contact us regarding
technical consultation
and price/delivery.
Factors Enabling High-Speed Pick and Place
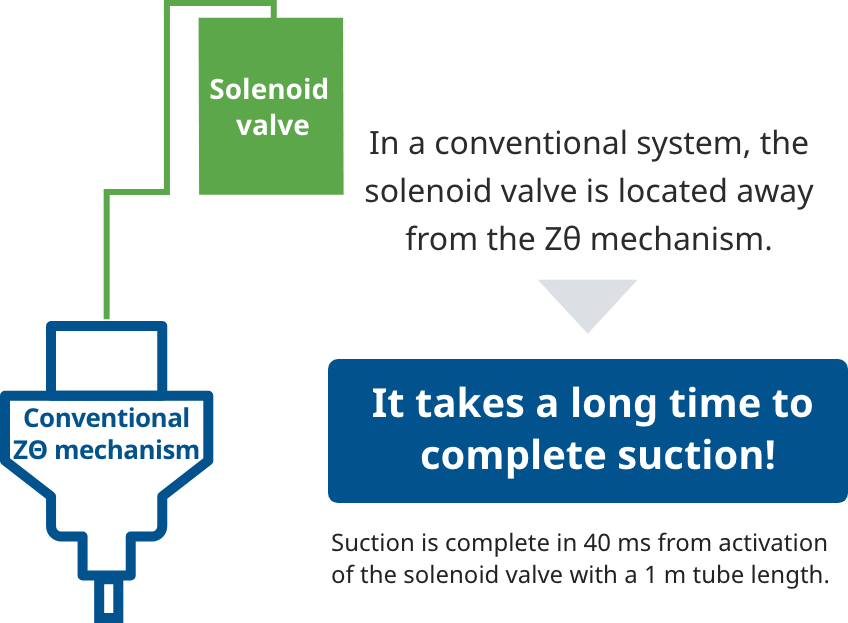
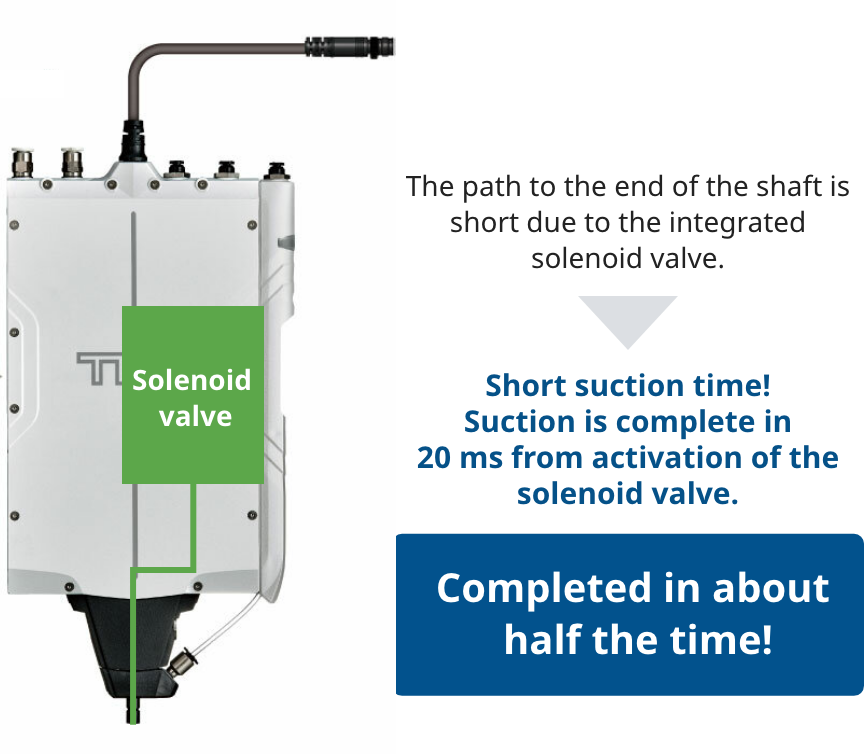
It's fast because the pneumatic passage is short!
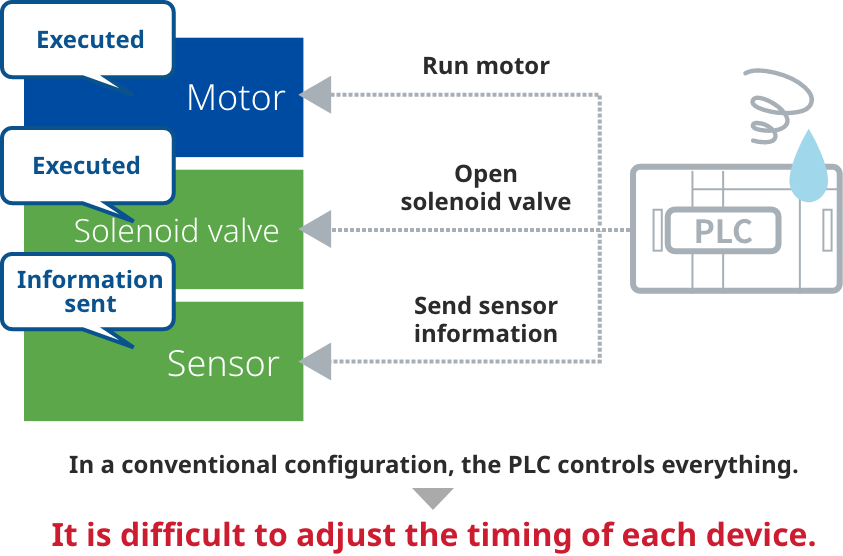
Fast integrated control!
Examples of
proposed solutions
Problem
We want to speed up the total cycle time of our electrical inspection process for electronics to increase process capacity!
Selling point
Simple-to-use, all-in-one package with integrated pneumatic device.
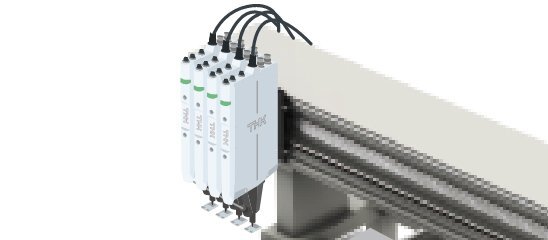
Uses three axes and four units, and installing in a stacked configuration reduces the amount of times the XY axis moves.
Problem
We want to inspect the picked components directly on camera to visually inspect devices!
Selling point
Speeding up cycle times for XYZ axes on existing devices is needed more than damage-free devices. It also features a Θ axis, enabling 360° inspection.
Problem
Cut components are moved to trays on the production line. We want to use the PPR for line expansion to speed up cycle times!
Selling point
Camera correction on Θ axis.
PPR is used to stack 8 axes in a narrow pitch.
Pick and place without worrying so much about damaging workpieces.

Installation Support
Support staff who have mastered the use of the PPR will verify the implementation from many angles to ensure that there are no issues.
When considering a purchase of a product, we will interview you about your needs, starting from concepts such as "something like this" and "I want to run it like this." Please feel free to contact us.
Technical calculation
(cycle time/
transportability)
We can pre-calculate the feasibility of operation based on the mass and inertia of the conveyed object and its operation pattern.
Experiment
(workpiece pick and place trial)
We will experiment using actual workpieces, nozzles, etc. to determine whether or not the envisioned operation can be performed.
Demo machine rental
When considering a purchase, we will be happy to lend you a demo unit. Please contact us with the details you wish to confirm.
Sample program
We can provide a sample operation program that matches the actual usage concept. Please consult us about connecting to PLC.