レストランやホテルで配膳ロボットなどのサービスロボットが普及しつつあり、最近では人の形をしたロボット、「ヒューマノイドロボット」に関する話題も増えてきました。かつてはSF映画の中だけの存在と思われていた技術が、研究開発の段階を経て事業化に向けた動きもみられる中、私たちの日常生活の中で目にする機会も増えてくることでしょう。今回は、ヒューマノイドロボットの進化と、THKが開発した「FRED」(フレッド)について詳しくご紹介します。
期待が高まるヒューマノイドロボットの進化
ヒューマノイドロボットは人間の形を模したロボットの総称であり、両手両足を備えて歩くロボットは皆さんが最も想像しやすいロボットかと思います。ヒューマノイドロボットは人間の代わりに様々な作業を代替することができる究極の汎用機械として、長年期待されてきました。一方、その実現には様々な技術が必要で、映画や漫画の世界で活躍しているようなロボットは期待されながらも未だに実現されていません。しかしながら、近年のAI技術の発展により、スムーズで高精度な言語処理や、未知の環境での安定した歩行、柔軟物体のハンドリングなど、これまで困難であった領域で急速な進展を見せています。このことから、ヒューマノイドロボットがこれまで求められてきた汎用的な作業を実現し、人々の生活の中でその役割を広げていくのではないかと期待が高まっています。
THKのヒューマノイドロボットへの取り組み
THKは将来の汎用的なヒューマノイドロボットの実現に向けて、様々な挑戦を続けています。
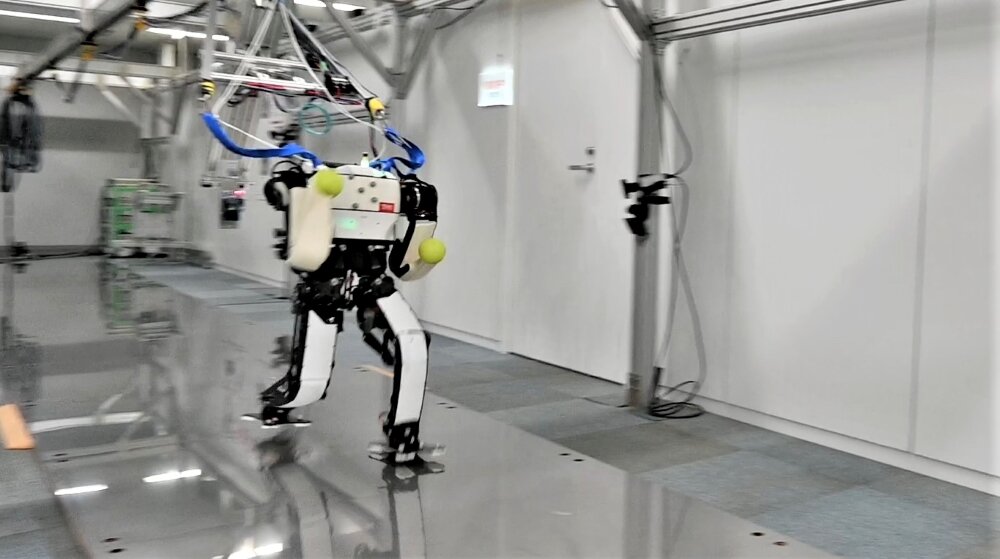
高い身体性能を実現したヒューマノイドロボットFRED
THKが開発したヒューマノイドロボット FREDはFlexible Robust Engineering Design、つまり「柔軟で頑丈な工学的設計」という意味の頭文字から取った名前で、このロボットの目指す形を表しています。
FREDは、高いバックドライブ性による耐衝撃性を備えたアクチェータにより、高い身体性能を実現しています。高速走行時に発生する地面との衝突を柔軟に吸収する特性、高速に動作するための出力性能、高い精度の制御性能を兼ね備えています。
ヒューマノイドロボット FREDの仕様
| 型式 | HR-S01 |
| 高さ | 1,200 mm |
| 質量 | 37.3 kg |
| 脚長 | 700 mm |
| 自由度 | 20 (Leg: 6, Arm: 4) |
世界最高水準の走行速度 時速13.8km (3.8m/s) を達成!
ヒューマノイドロボット FREDによる高い技術力を示すものとして、2025年5月に行った走行実験により、世界最高水準の走行速度 時速13.8km (3.8m/s)を達成することができました。
実現のカギとなった3つの技術
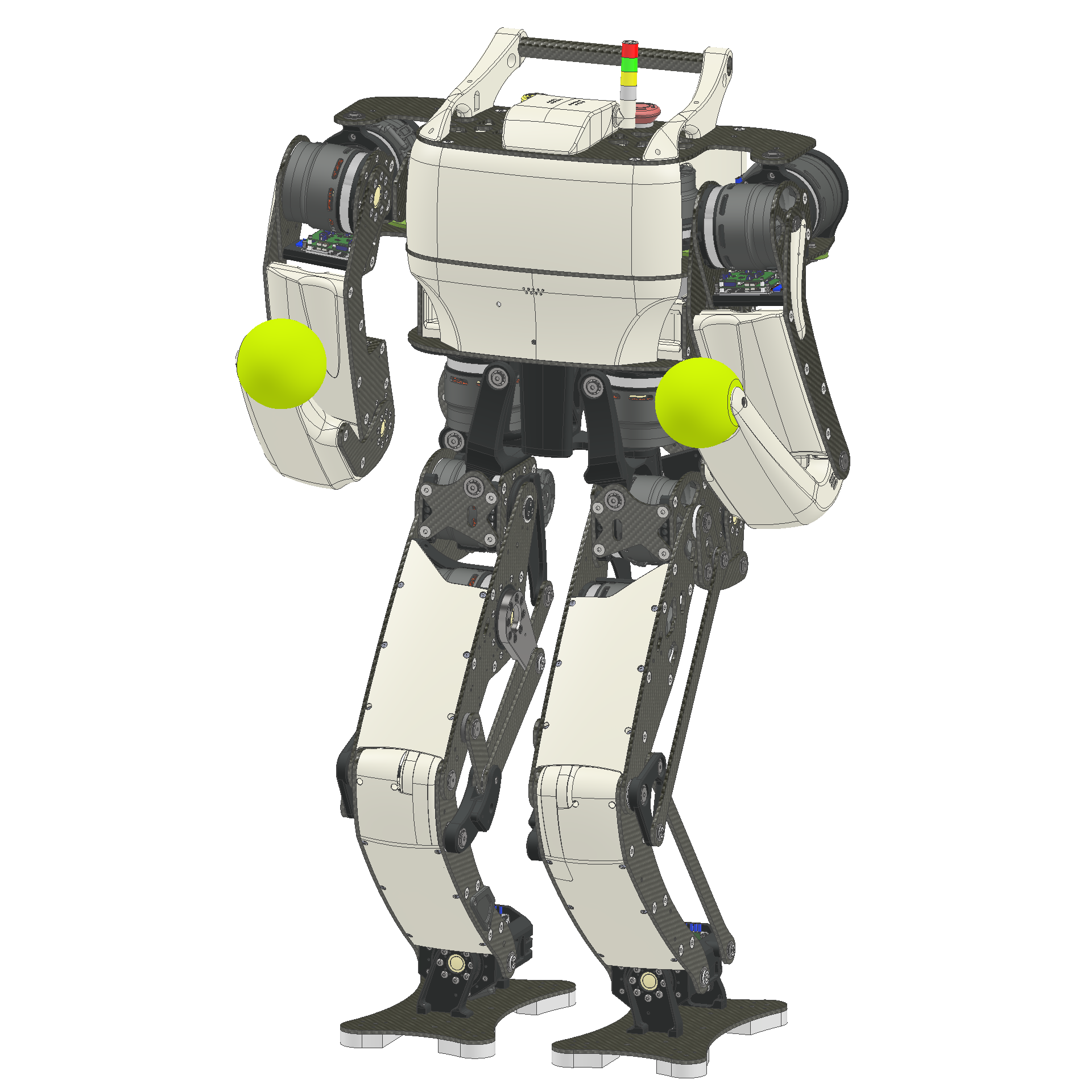
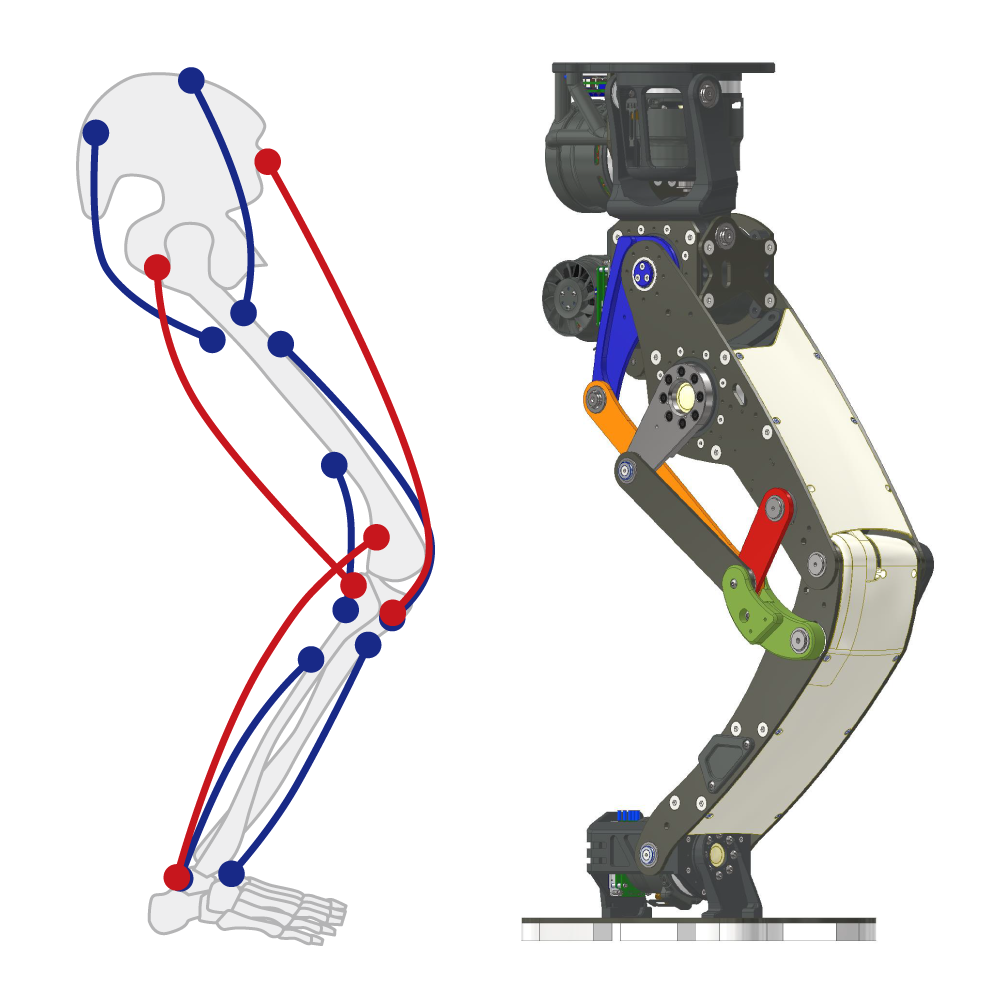
1.独自の脚リンク機構
生物には、二つの関節にまたがって配置される二関節筋という筋肉があります。この筋肉は、重力に対抗して身体を支えるために適した出力特性を持つように配置されていると言われています。これに対してヒューマノイドロボットFREDは、筋肉の配置そのものを再現するのではなく、二関節筋と類似した動特性となるような独自のリンク機構を設計しています。これにより、走行時に地面から受ける衝撃を柔軟に受け流しながら、制御性を向上させることができます。
2.バックドライブ性と小型高出力を両立した高性能アクチュエータ
上述した仕組みを実現するためには、アクチェータのバックドライブ性が重要になっています。また、ヒューマノイドロボットは多くの稼働軸があり、アクチェータを小型軽量に設計しないと、自身の重量によって動作が困難になるため、小型高出力のアクチュエータの実現は普遍的な課題です。バックドライブ性とは外部から力を受けた時に受動的に動いていなす特性で、外部からの衝撃や地面との衝突に対する耐久性、そして外から押された時の柔軟な動きなどを実現するために重要です。この小型高出力とバックドライブ性の両立は相反する部分もあり、実現には様々な困難がありました。
THKでは以下3つの要素技術を組合わせることにより、この特性を高い次元で実現しています。
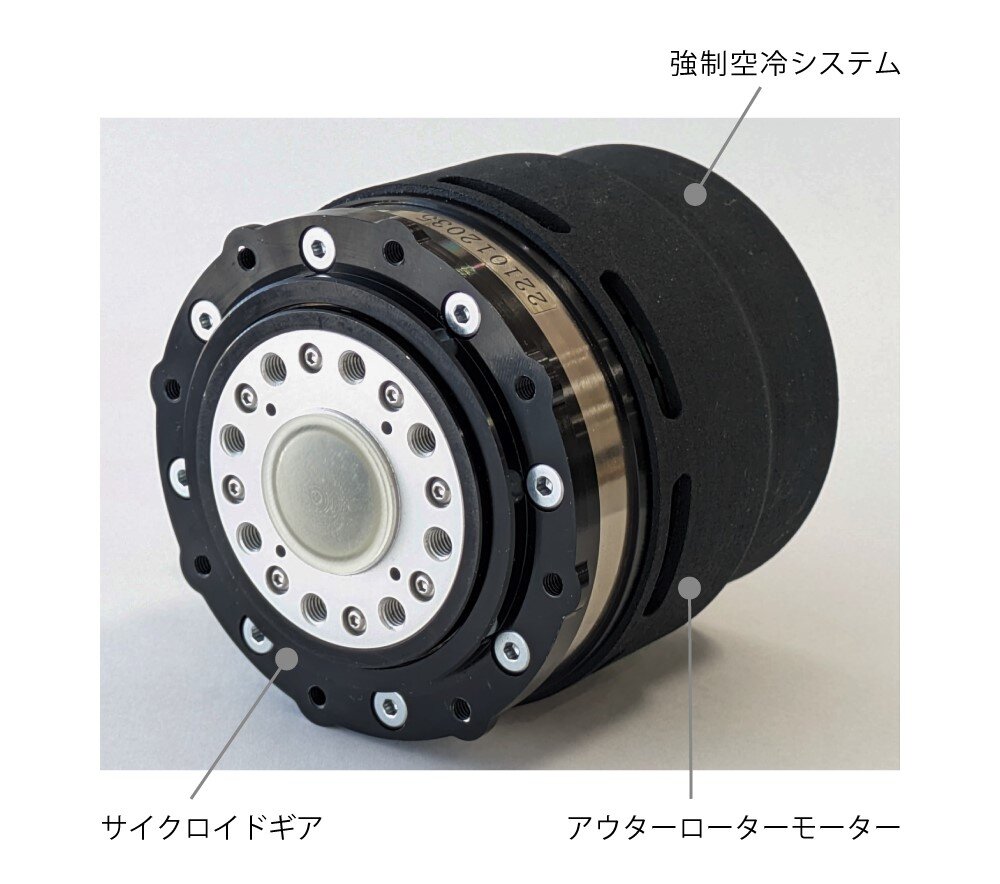
①サイクロイドギア
ギアとして複数の歯が同時に接触することで、高い耐衝撃性を実現しています。高効率な伝達特性を実現するギア形状にて高いバックドライブ性を得ています。
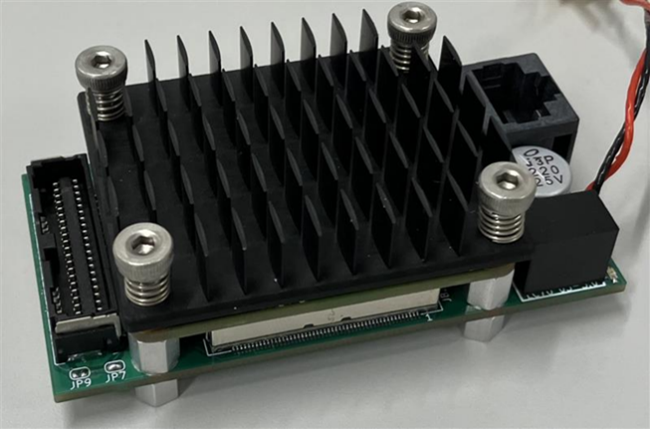
②アウターローター型モーター
高トルクに有利なアウターローター型モーターをアクチェータとして一体設計することで軽量化を実現し、さらにロボット用にコギングトルクを軽減する工夫がされています。
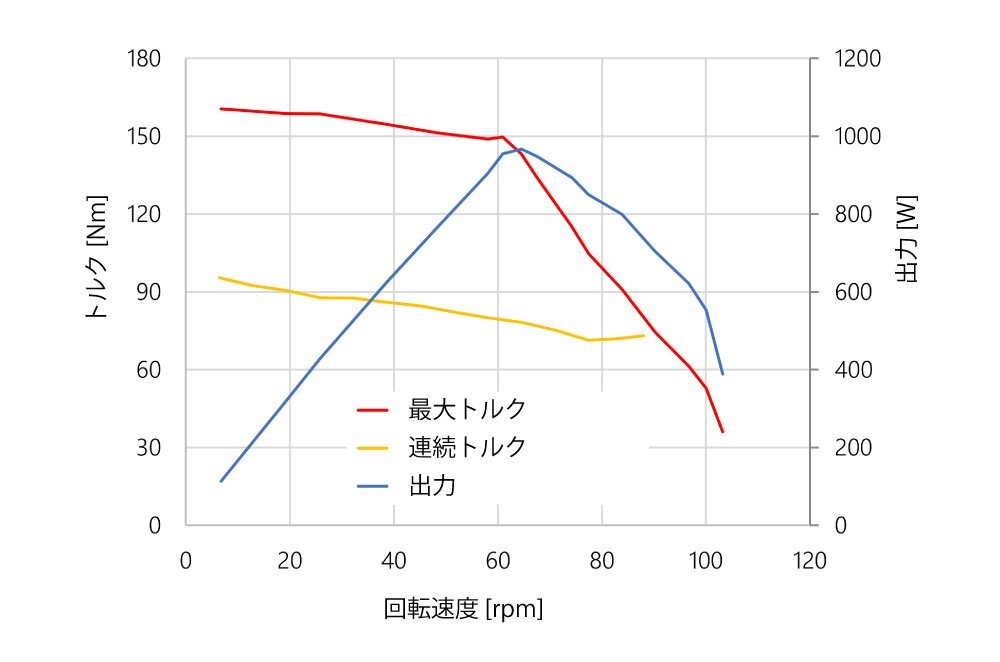
③強制空冷システム
独立した冷却用のファンモーターを搭載し、モーターのコイルを直接冷却することで冷却性能向上させました。その結果、発熱が課題となる低回転域での連続トルクが向上しています。
アクチュエータ仕様(参考値)
| 型式 | RA-C80-04 |
| 最大トルク | 160 Nm |
| 最大回転速度 | 100 rpm |
| 最大出力 | 960 W |
| 直径 | 85 mm |
| 長さ | 82.5 mm |
| 質量 |
960 g (モータドライバを除く) |
耐衝撃性とバックドライブ性を示したデモ動画
次の動画は20kgのおもりをロボットの片脚に落とすデモンストレーションです。20kgのおもりを上下に持ち上げる力があるとともに、落下させたときにバックドライブして柔軟に受け止めることで、優れた耐衝撃性も実現しています。
3.1ms周期でのリアルタイム制御を実現するロボット制御コントーラ
ロボットを素早く動作させるためには、高速で正確な制御が必要です。通信処理の一部をFPGAによるハードウェア回路によって実装したロボット制御コントローラにより、1ms周期でのハードリアルタイム制御性能を実現しています。安定で正確な制御通信を実現するとともに、制御ソフト側のタイミング処理が簡素化される特徴があります。
THKの目指すヒューマノイドロボットの未来
今回は世界最高水準の走行速度を実現したヒューマノイドロボットFREDとその技術について紹介しました。ヒューマノイドロボットとしては速い走行速度を実現しましたが、時速13.8kmは小学生が全力で走る速度に相当し、人間の能力にはまだ追いついていません。人間の代わりに様々な作業を行うには人間と同等の運動能力が必要であり、まだ道半ばにあると考えています。もちろん走る能力だけでなく、様々な作業をこなすためには多くの技術が必要です。
THKでは、走る能力だけでなく、様々な技術にも挑戦しています。しかし、THKだけの力で全てを実現することは難しく、人類の英知が集まって初めて実現するものだと思っています。現在はまだ研究開発段階にありますが、THKの先端的な技術力を駆使し人類の発展に寄与することを目指して、開発を続けていきます。
また、この度THKは2025年7月13日(日)~19日(土)に開催された大阪万博のイベント「未来づくりロボットWeek」にてヒューマノイドロボットFREDを展示し、多くのご来場者の方にご覧いただきました。本イベントは、ロボットの未来を育む人と技術にフォーカスする体験・体感型イベントとして、大阪・関西万博会場で開催されました。すでに会期を終了しておりますので、ご了承ください。
※2025年8月21日:未来づくりロボットWeekの会期終了に伴い、出展に関する記載を変更しました。
2025年日本国際博覧会(大阪・関西万博)「未来づくりロボットWeek」に出展いたします(ニュースリリース)