2025年12月02日
製品
ライン生産の自動化に貢献!THKのコンビネーションロボットのご紹介

今までのロボットの多くは「高精度な作業」「重量物の搬送」「危険な作業工程」「安定した生産性」など、人では作業が難しい工程を自動化するという目的で普及してきました。しかし、昨今では労働力不足の課題から、簡単な作業だけでなく人が行う全ての工程が自動化の対象となっており、そのニーズが加速しています。また、自動化を求める業界も、サービス、医療、介護、物流など幅広くなってきたことで、ロボットに求められる仕様も多種多様になってきています。今回はカスタマイズによって、限られた空間に効率的な軸配置を実現するコンビネーションロボットをご紹介します。
人の作業の置換えによる自動化への課題
一から自動化された工場のラインを立ち上げるのとは違い、すでに人が稼働しているラインを自動化するためには下記の課題があります。
- 省スペース化
既存の機械の配置や作業の流れを変えずに自動化をしたいが、ロボットを配置するための作業スペースを増やすことが難しいというお声をいただきます。 - 人とロボットの作業スペースの共有
1日の時間帯によって生産量が可変するケースがあるため、生産量を増やしたい時間帯は人が作業して、夜間はロボットを稼働させたいというご要望をいただきます。その場合、人とロボットが同じ作業スペースを共有する必要があります。また、万が一ロボットが故障してしまったことも想定しなければなりません。突発的に人が作業する場合においても、その故障したロボットが邪魔にならないようにしておく必要があります。
ライン生産の自動化を実現するために
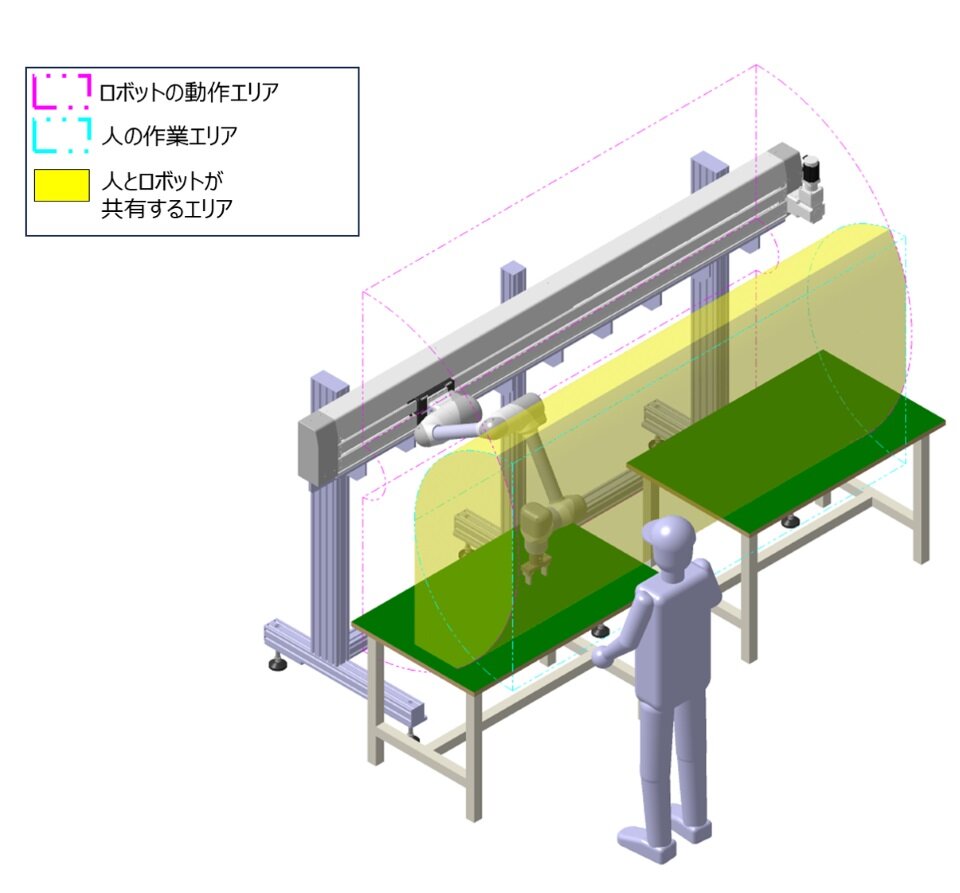
国内の量産工場ではライン生産を採用されることが多く、「ロボットで人の作業を置換える」「人と同じ作業スペースを共有する」ためには、ロボットが人とある程度同じ作業領域を持つことが重要です。人が作業するときは作業エリア内で左右に移動することがあり、以下の図に示された黄色の半円柱エリア内で作業を行うと想定されます。それでは、人の作業エリアと同じ領域をカバーするためにロボットにはどのような仕様が求められるでしょうか。
例えば人の足の動きに相当する「直動軸」と人の腕の動きを3軸または4軸の「関節軸」で再現した垂直多関節軸のロボットであれば人の作業をカバーすることが可能であり、人と同じ作業領域を持つことができます。また、それを効率的に実現させるためには、「関節軸」は最小限の軸数であることが望ましいです。
ロボットのカスタマイズ化を実現する 回転モジュールRMRのご紹介
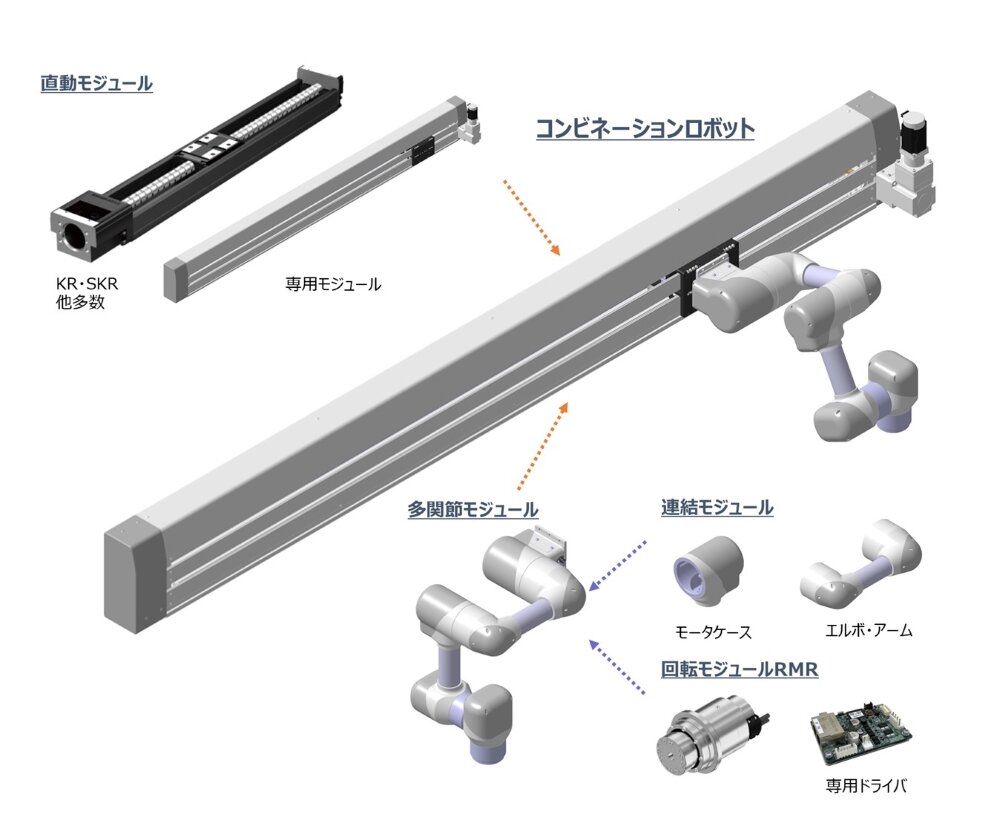
THKでは最小の関節軸数の多関節ロボットを実現するために、「回転モジュールRMR」をリリースしました。回転モジュールRMRは、クロスローラリング、減速機、モータ、エンコーダ、ブレーキを一体化したモジュール製品のため、お客様の設計や選定、組立の工数を削減することが可能です。RMRはサイズが4種類あり、形番ごとに減速比違いの仕様をラインナップしています。ロボットの関節軸に最適なRMRとその他のモジュールとの組合わせ次第で自由にロボットを設計することが可能です。

回転モジュールRMRを組合わせたコンビネーションロボット
ロボット関節軸の駆動部分として回転モジュールRMRを活用した自動化をご紹介します。
複数のRMRを連結するために「連結モジュール」をキット化しています。THKでは多関節モジュール(RMR+連結モジュール)と直動モジュールを組合わせた製品を「コンビネーションロボット」と呼んでいます。一般的な垂直多関節ロボットは6軸、7軸が多いですが、コンビネーションロボットであれば、関節軸数を最小限にすることが可能です。さらに、関節軸サイズ、アームリーチ、取付姿勢などをお客様の要求に合わせてカスタマイズすることができます。
コンビネーションロボットでできること
- 動作エリアを自由に設計可能
関節軸数、関節軸サイズ、アームリーチ、取付姿勢をカスタマイズすることで、自由度の高いライン構築を実現します。 - 人との干渉を最小限に抑える
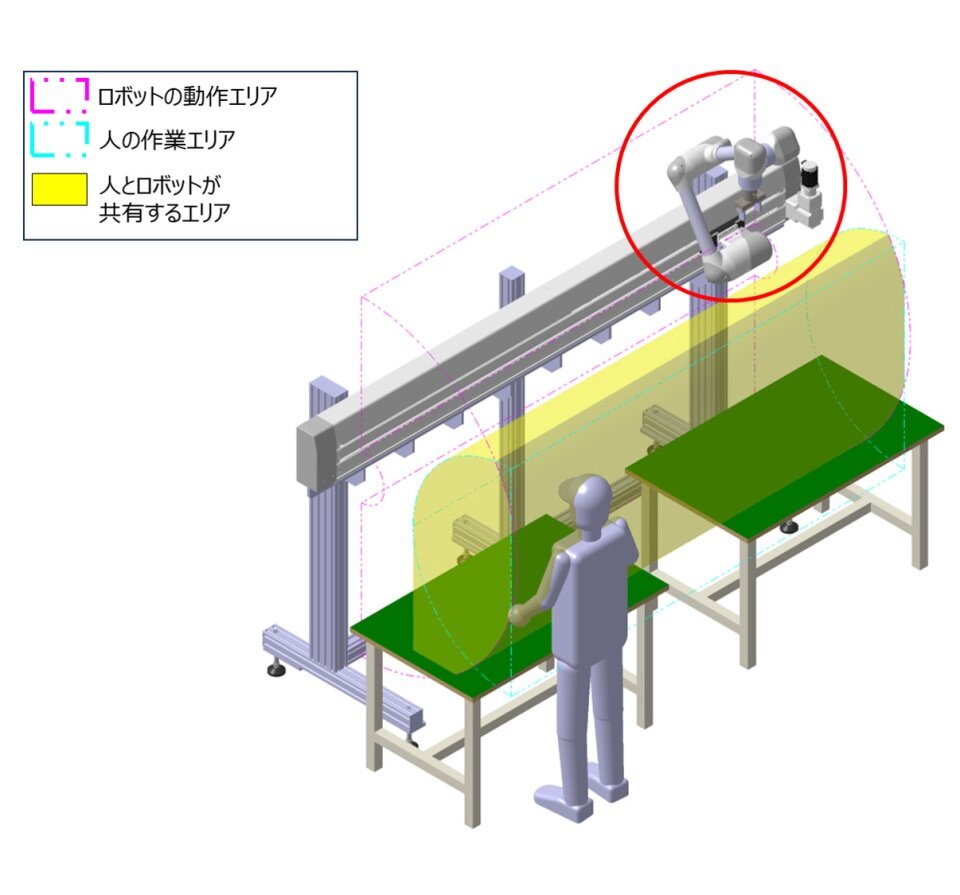
コンパクトな直動モジュールを使用しているため作業エリアの背面に配置しやすく、人の作業を妨げないロボット配置が可能です。 - 作業エリアからの退避が容易
万が一ロボットが故障しても、コンパクトな多関節モジュールは人の作業エリアからの退避が容易です。
コンビネーションロボット活用事例
人の作業をコンビネーションロボットに置換えた事例をご紹介します。洗浄工程で複数の異なる洗浄液にワークを順番に浸すライン工程でご採用いただきました。従来は人が洗浄を行なっていましたが、洗浄液を使用するため保護具が必要になることや、洗浄時間の時間管理が必要であることなど、人が行うには大変な作業でした。そのため、コンビネーションロボットを導入いただくことで自動化(無人化)を実現することができました。実際に自動化した様子は、下記リンクから限定動画でご確認いただけますので、ご興味のある方はぜひ合わせてご覧ください。
※フォーム登録後、動画をご視聴いただけます。
コントローラ/GUIまでサポート
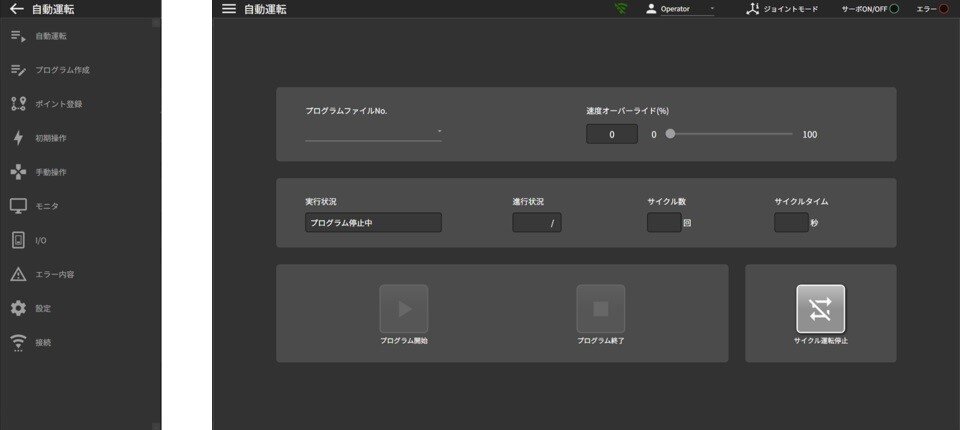
実際にモーション制御をお客様で行うことは、導入時に大きな負担となります。3軸、4軸で構成された回転関節軸を直交座標系で動作させるためには、キネマティクスを解くための複雑な計算が必要となるため、THKで制御コントローラをご用意しています。また、立上げ時に必要な、ティーチング、モーションプログラム作成、自動運転を行うことが可能なユーザーインターフェイス「C-Robo」もご用意しています。THKがお客様の要求に対して幅広く柔軟に対応することで、導入時に必要なプログラム作業を大幅に削減することができます。
さらにTHKのロボットコントローラの上位にPLCなどの制御機器を準備いただき、Ethernetを接続することで「C-Robo」と同様の操作や、コントローラ内に保存したロボットモーションプログラムの実行などが上位制御機器から可能です。
カスタマイズ可能な多関節ロボットによる自動化
今回はさまざまな業界、ニーズに対応するカスタマイズ可能なコンビネーションロボットについて、ライン生産での導入を例にご紹介しました。今後もモジュールの拡充、繊細な協調制御などを付加していくことで、多様化するユーザーの自動化要求にお応えしていきます。人で行う作業の自動化をお考えのお客様は、今現場で抱えている課題に対するソリューションや自動化のヒントなどをご提案できますので、まずはお気軽に最寄りの支店へお声がけください。
コンビネーションロボットの詳細はこちら(THKサイト)