2026年06月17日
製品
イチゴの収穫ロボット用エンドエフェクタによる農業支援

多くの人に親しまれ、食卓やスイーツに欠かせない存在である「イチゴ」。しかし、裏側では少子高齢化による人手不足や、収穫作業が特定の時期に集中することによる現場負担など、栽培・収穫を取り巻く課題が深刻化しています。さらに、世界的な食料需給の不安定化を背景に、農業分野では生産性の維持・向上に向けた自動化ニーズが高まっています。
こうした課題に対応するため、THKではイチゴ収穫に特化した収穫ロボット用エンドエフェクタ(ハンド)を開発しました。本記事では、その開発の背景に加え、狭い栽培環境でも確実に作業でき、果物を傷つけにくい設計思想、さらに施設園芸における実用化事例と実績についてご紹介します。
人手不足と世界の食料課題
日本では農業従事者の高齢化と若年層の離脱により、労働力不足が深刻化しています。特に特定の時期に集中する収穫作業は現場の負担が大きく、安定的な農業生産を維持するうえで人手の確保が課題となっています。

引用:農林水産省「農林業センサス」 基幹的農業従事者数 年齢別基幹的農業従事者数(個人経営体)
https://www.maff.go.jp/j/tokei/kouhyou/noucen/pdf/census_25k.pdf
一方で世界に目を向けると、気候変動や国際紛争、物流網の混乱などを背景に、食料の安定供給に対する懸念が高まっています。こうした要因は地域ごとに異なるものの結果として生産性の向上や供給体制の強化という共通した課題があります。
こうした課題を受け、収穫工程の自動化・効率化への期待が高まっています。
THKは「世にない新しいものを提案し、世に新しい風を吹き込み、豊かな社会作りに貢献する」という理念のもと、農業分野における課題解決に挑戦しています。
収穫ロボットの需要~イチゴに特化する理由~
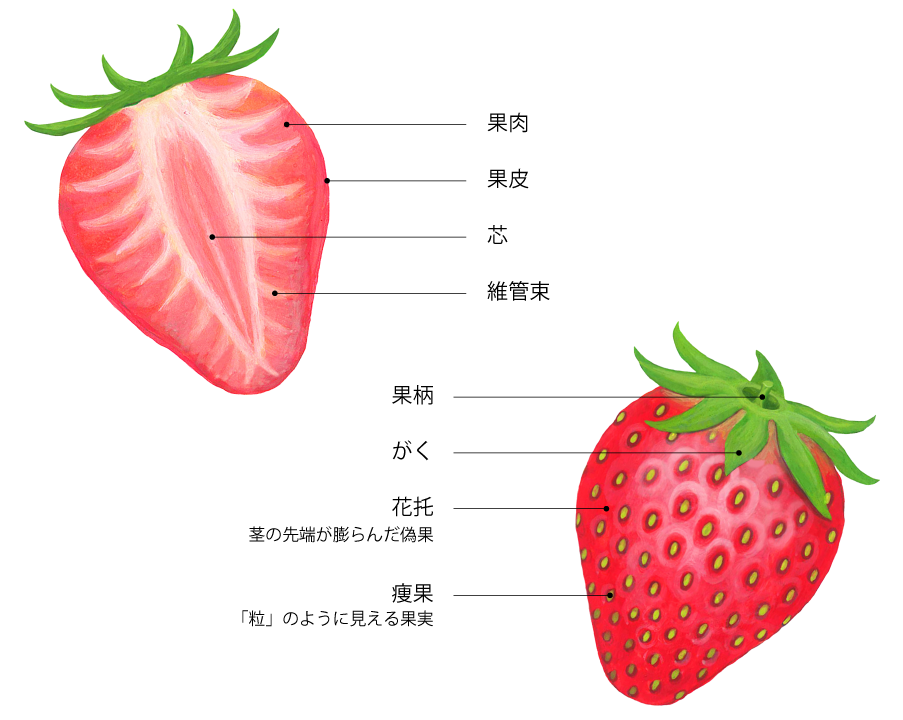
イチゴは果皮が柔らかく、ダメージを受けやすいため、果皮に触れずに収穫することが理想的な収穫方法になります。従来は人の手による摘み取りで収穫されており、施設園芸では育苗から収穫に至るまでの労働投入量のうち、その多くが収穫時期に集中します。

こうした状況を背景に、収穫作業の効率化と省人化を実現する手段として、収穫ロボットの導入ニーズが高まっています。
収穫工程の自動化が進めば、収穫ピーク時の人手不足の解消に加え、労働環境の改善、生産性の安定化、そして収穫精度の向上による品質安定化が期待できます。また、イチゴは高付加価値作物であるため、自動化による投資回収の見通しが立てやすい点も特長です。
これらの背景を踏まえると、まずはイチゴに特化したソリューションから展開することには大きな意義があります。この考えのもと、THKは果柄とがくにのみ触れて収穫できるエンドエフェクタを開発しました。
収穫ロボット用エンドエフェクタの重要性
ロボット全体の性能は、末端のエンドエフェクタに大きく依存します。エンドエフェクタは果実へのアクセス性、把持の確実性、果実や周辺植物部位の非破壊性、切断・摘み取りの精度など、多面的な要求を満たす必要があります。特にイチゴのように葉・茎・果実が絡み合う環境では、狙った果実に到達できるかどうかが収穫効率を左右します。また、現場でのメンテナンス性や刃の交換容易性、耐久性も重要です。THKはこれらの課題を総合的に考慮して設計・製作・検証を進めました。
イチゴ収穫に最適化したハンド設計
当社の収穫エンドエフェクタは、以下の特長を備えています。
- 非破壊性(他害防止)
果実や周辺の葉・茎への接触を最小化する形状と運動軌跡を採用し、収穫時に生じやすい擦り傷や圧迫を抑制します。これにより、果実品質を維持し出荷量の安定化に寄与します。 - 狭所へのアクセス性
葉やつるに阻まれた狭い空間でも果実へ到達できるよう、細身のフォルムで把持・切断が可能なメカニズムを採用しています。これにより、従来は収穫が難しかった位置の果実も安定して収穫可能です。 - 果柄の最小化
がく(ヘタ)に刃を押し当てて切断する機構により、果実に残る果柄を短く仕上げることができます。果実に残る果柄が短くなることで、搬送・梱包時の果実同士の接触ダメージを防ぎ、果実本体の保護にも寄与します。
-
刃のメンテナンス性
刃は交換・調整が容易な構造としており、現場での維持や管理の負担を低減しています。鋭利すぎない刃形状の採用により、必要以上の摩耗や交換頻度を抑えられます。
鉛直方向に収穫する場合でも床を傷つけません
栽培環境によっては、真上から果実にアクセスしなければならない場合があります。この際、果実のすぐ近くに床面があるため、刃を持つ一般的なエンドエフェクタでは床を傷つけることが懸念されます。本製品の構造では、床を傷めず、かつ刃の消耗を抑えながら、果実を安全に把持・切断することが可能です。
THKでは、多面的なニーズ調査で得た知見と、民生分野で20年以上培ってきたノウハウをもとに、収穫ロボットに最適な新しいメカニズムを考案しました。PoCによる実証検証を経て製品化することで、現場で使えるソリューションとして提案しています。
特許取得済み(国内)と販売実績
本製品は国内で特許取得済みであり、海外でも出願中です。既に複数社への販売実績があり、現場での評価と改善を重ねてきました。実運用に基づくフィードバックを設計に反映することで、現場適応力の向上を図っています。
実際にご購入いただいたお客様からは、収穫ロボットにおけるエンドエフェクタが収穫性能に直結する重要な要素であるがゆえに、販売当初はエンドエフェクタを外部調達することに慎重な姿勢を示されるケースも見受けられました。しかしながら、収穫エンドエフェクタに集中して開発・改良を行なってきたことで、THKのエンドエフェクタの良さに共感いただく機会が増えています。またこのような製品はTHKの得意分野でもあることから、エンドエフェクタの開発自体をお任せいただくケースも多くなっています。なお、本製品は2026年6月時点で開発開始から約3年が経過しており、今後もさらなる性能向上に向けて継続して開発に取り組んでいく予定です。
収穫ロボット用エンドエフェクタの開発は、果実へのアクセス性や把持・切断精度、非破壊性など、複数の要求を高いレベルで両立する必要があり、技術的難易度の高い分野です。一方で、イチゴ収穫で培った技術や知見は、他の作物や品種への応用も見込まれ、今後の技術展開や展開領域の拡大につながる可能性があります。
農業課題の解決に向けた今後の技術展開
本製品は、イチゴ以外にもピーマン、トマトなど、他の農作物への適用も視野に入れて開発を進めています。
収穫ロボットをご検討中の企業・研究機関で本製品にご興味のある方は、弊社の収穫ロボット用エンドエフェクタを候補の一つとしてぜひご検討ください。
今後は、収穫エンドエフェクタのさらなる改良・高度化を進めるとともに、ロボットメーカーおよびSIer様との協業を通じて、収穫ロボットの普及と農業の自動化に貢献してまいります。
※本製品は受注生産の開発品です。仕様に応じて価格・納期が変動します。詳細はお気軽にお問い合わせください。
ご興味・ご関心をお持ちの方はお気軽にお問い合わせください。