
人間と瓜二つのロボットが、自分の仲間として働く、まるで映画のワンシーンのような世界が近づいています。既にデジタル空間ではAIが、現実空間ではヒューマノイドが活躍しています。このリアルの世界に存在するロボットはどのように誕生するのでしょうか。その開発現場の舞台裏をご紹介いたします。
ヒューマノイドを開発
小さい頃、誰しもがロボットに憧れを抱き、ロボットを操縦してみたいと考えたことがあるのではないでしょうか。中には、ヒューマノイド開発という壮大な夢を持った人もいると思います。
ヒトの構造は、機能を分解して考えると以下の要素で構成されています。
- 強固な骨格をなす骨
- パワーを生み出す筋肉
- エネルギーを注ぎ込む血液
- 司令塔である脳
- 指令とフィードバックを行う神経
- 様々な状況判断をするための感覚器官
- 外部からエネルギーを取り込み、内部エネルギーに変換する内臓
ヒトの構造を機械に置換える、これがヒューマノイド開発といえそうです。これは、「言うは易く行うは難し」です。実現するには、まずヒトの構造と機能を深く理解する必要があります。
-
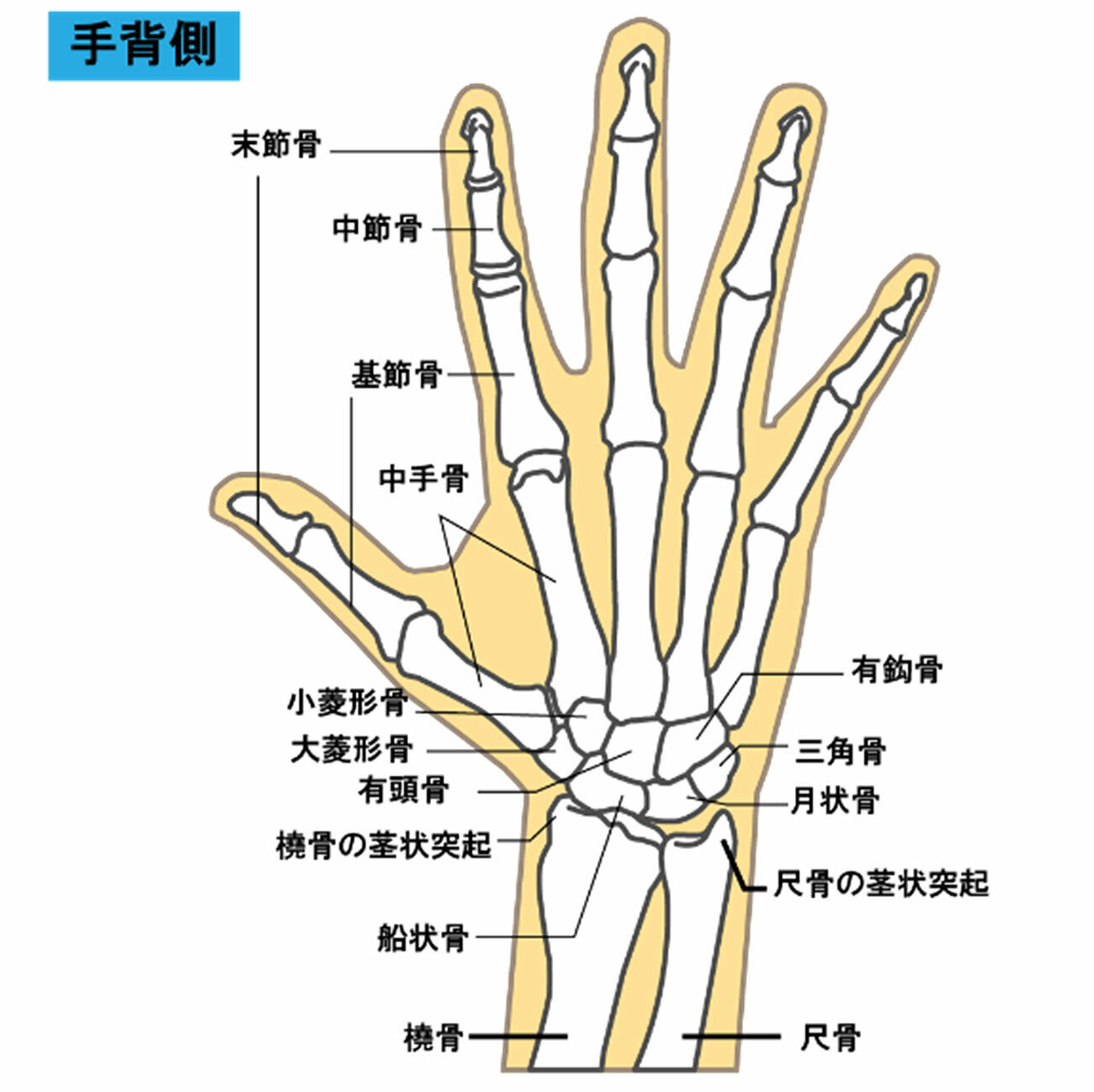
骨格はどうなっているか
- 接続部となる関節の自由度はどうか
- どのように感覚器官からの信号を処理しているのか
知れば知るほど、その膨大さに困惑します。本当に、限られたサイズにこれだけの機能を盛り込めるのでしょうか。
「構造」ではなく「機能」を真似る
通常のアプローチでは、小さい頃思い描いたヒューマノイド開発は、そのまま夢で終わってしまいます。これは、ヒトの構造をそのまま機械化しようとしたことによる挫折といえます。実は機械化のアプローチには、このように構造をそのまま置換える手法の他に、構造はどうであれ、“抽象化した機能を実現する”という手法もあります。
今回は、ロボットハンドの開発事例をご紹介いたします。ヒトの進化の中で「手」はモノを掴む、持ち運ぶなど、様々な動作ができるように進化してきました。
- 非常に複雑で繊細な動き
- わずかな凹凸や温度変化
- 動きも見逃さない敏感な感覚器官
これらを構造で真似をせず、「手」が持つそれぞれの機能や入力/出力で考えれば、より簡単な構造で実現ができそうです。
ヒューマノイドに指は5本必要か
ヒトを模したロボット、ヒューマノイド。ヒトのロボット化を目指すのであれば手の指は5本必要ですが、ヒトがやっていることを代替えするロボットと考えたとき、指は5本必要でしょうか。そもそも作業の代替えであれば、ヒトと同じ手である必要はあるのでしょうか。ヒトの手は20以上の自由度があり、手と同じサイズにそれぞれを制御するだけのアクチュエータを組込むことは非常に困難です。関節は更に多く、それだけのメカ機構に加えモータなどのアクチュエータ、センサ類、さらに配線も必要となります。
最小構成へのチャレンジ
モータは1個
ヒトの手が持つ機能、「握る」「掴む」「つまむ」をどこまで簡素化して実現できるかが課題です。最小限の構成であれば、モータは1個が望ましいです。複数個になれば、サイズも大きくなり電力も必要で、発熱の問題も考えられます。よって、最小構成へのチャレンジは、モータ1個で実現を目指します。
指は3本
指は何本まで減らせるでしょうか。掴むことだけを考えれば2本でも持てないこともありません。しかし、ワークには様々な形状があり、それらのワークを安定して把持した状態で移動させなければいけません。様々な形状を安定して把持し続けるには、どうしてもあと1本は必要です。以上を考えると、最小構成の指の本数は3本となります。
モータ1個に指は3本で決まり
指は3本といっても、3つ爪チャックのように固定形状の指ではワークの形状に合わせて握ることができません。そのため、ヒトの指のように関節があって巻き込むように動かすには、リンク機構が必要となります。そのうえ、モータは1個しかないため、1個のモータの出力で3本の指を駆動させ、指の関節はストローク中に曲がるようなリンク機構を組込む必要があります。「モータ1個の回転を直動に変換し、そのストロークをリンク機構で分配する」この複雑でありながらシンプルな構成を実現するため、モータもリンク機構の一部を担うトラニオン構造でマウントします。
SEED アクチュエータを採用
最小構成でロボットの手が実現できても、制御ボックスが大きくなっては意味がありません。THKが開発したSEEDアクチュエータは小型のモータを20mm角しかない“小型分散配置モータドライバ”SEED Driverで動作させることができ、手のユニット内に制御システムまで内蔵が可能です。
簡単な制御
様々な形状を握ったり、つまんだりするのは、一般的には複雑な制御が必要です。SEEDアクチュエータでは、それらを単にON/OFFのみで実現できます。
- ONで手を閉じる動作を開始
- ワークに触れると指令値と実際の動作に偏差が発生
- この時点で閉じる動作を停止
- その後は1パルスずつ閉じる動作を行う把持モードに自動で移行
ワークの形状を問わず、握る動作であっても摘まむ動作であっても、指令は単にON/OFFのみで完結します。
「汎用グリッパー TRX」 の誕生
こうして、最小構成であるモータ1個、リンク機構による3本の指、さらにSEED Driverによる制御で別置きのドライバも不要となり、電源を供給するだけで動作が可能な、コントローラ 一体型汎用グリッパー「汎用グリッパー TRX」が誕生しました。
今回は、ロボットハンドの開発に焦点を当てて、開発事例をご紹介いたしました。
今後も製品ジャーナルでは、弊社製品を通して、さまざまな情報を発信してまいります。
「汎用グリッパー TRX」のお問い合わせフォームはこちら(THKサイト)