2024年04月24日
製品
4本指ロボットハンドが実現するアイテムピッキングの自動化

近年、ECサイトの利用は個人、企業ともに浸透し、物流事業における業務量は増加の一途をたどっております。これに対して、働き手の高齢化、若い世代の減少、地方では過疎化が進むことによる人手不足が顕在化し、近い将来深刻な問題につながっていくことが予想されています。
この問題に対する一つの解答が人手に頼っている作業の自動化であり、物流の現場でも搬送やピッキングの一部で自動化が進められていますが、未だに多くの作業が人により行われているのが現状です。この分野の自動化は、作業効率、生産性、品質の向上など、多くの課題を解決することを期待されています。今回は物流現場の自動化に貢献するTHKのピッキングロボットハンドシステム(PRS)をご紹介いたします。
アイテムピッキング なぜ4本指?
ピッキングロボットハンドシステム(PRS)は物流におけるピッキング行程に着目し、アイテムのピースピッキングを自動化することを目的に開発された製品です。
開発にあたり、まずは小売業界で一般的な商品形状を以下の通りに分類しました。そして、これらを掴むためにはどのようなハンドにすれば良いか、「世にない新しいロボットハンド」、「汎用的なロボットハンド」をテーマとしてスタートしました。

ロボットハンドでは「吸着式」と「チャック式(挟む)」が一般的ですが、吸着式の場合、商品の表面が平面でないと吸着ができない場合があります。
それでは、チャック式はどうでしょうか。
例えば棚など隣接して陳列されている箱を端から順に1個ずつ掴むにはどうすればよいかを考えてみます。正面からアクセスすると中央の箱に接触する恐れがあり、真上からアクセスすると背面の壁に接触します。人の手作業では以下のような動作になります。
- 対象物を手前に倒す
- 両サイドに面が露出する
- 露出した面を把持する

この一連の動作では手前に倒す際に関節軸がないと実現できません。1本指で倒し、両サイドを2本で把持するので合計3本必要です 。より把持の安定度を高めるために、4本にして下から支えます。
次に、箱に入った円筒形状の商品の場合を検討します。
箱の上から見ると、箱の中の商品は掴めそうですが隙間が四隅にあります。(図中央)円筒形状を安定して把持するのに必要な本数としては3本ですが、90°毎に指を配置した4本の方がより安定します。(図右)

最後に、袋形状の商品の場合を検討します。
袋はどのように掴むと安定するでしょうか?
人は物の重心を捉え、落下させないように複数本の指で支えつつ、バランスを保てる掴み方を物の形状に応じて使い分けています。例えば袋の二辺を持つ姿勢から外側四辺を持つ姿勢に変化させるには指の付け根に回転軸が必要です。

小売業で一般的に販売されている商品形状を参考に、大きさや重量、置かれ方など、様々な状況でのピッキングシーンを検討した結果、アイテムをピッキングするには人の手に近い形状が汎用性もあり最も有効であることが分かりました。
このようにして、形状が人の手に近く、機能的である4本指ハンドのコンセプトが固まりました。
そして開発されたのが、第一関節、第二関節、旋回関節を独立して動作可能な、自由度の高い画期的なロボットハンドPRS-Aです。
自由度の高い4本指ロボットハンド


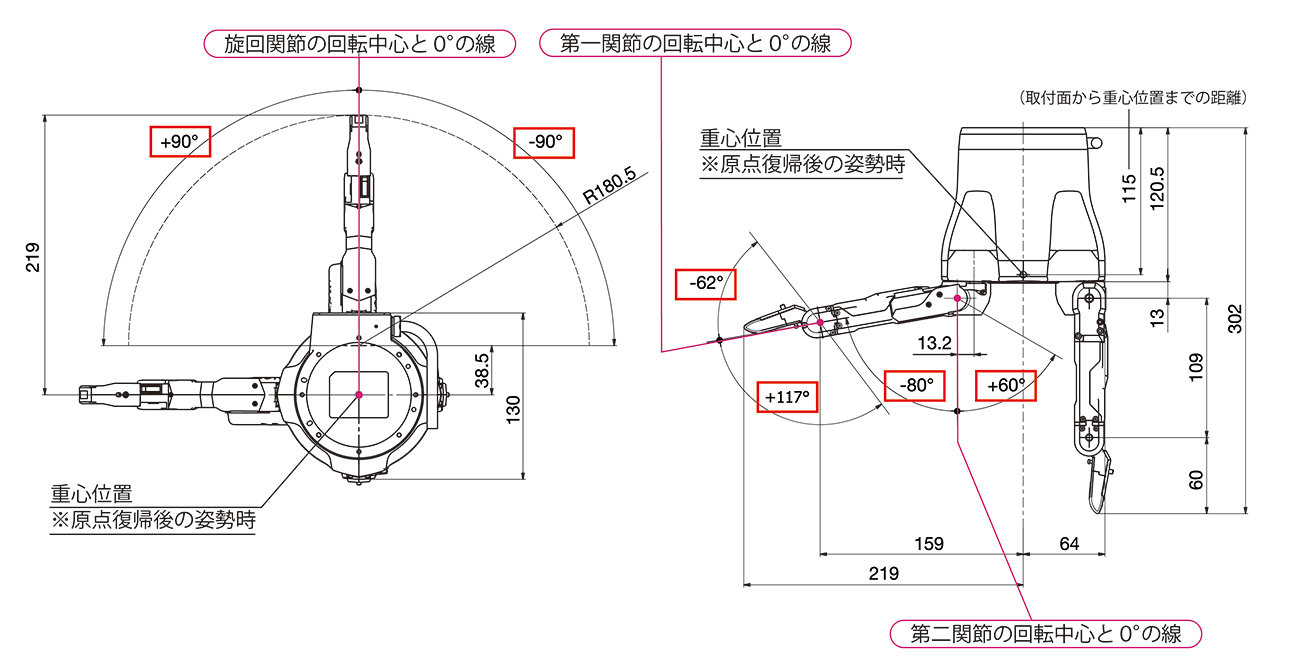
PRS-Aの特長
- 人の手に近い形をしているロボットハンド
- 4本指全12軸の関節を使い様々な形状、大きさのアイテムを人の指のような動作でピッキングが可能
- アイテムごとに専用ハンドの設計/交換が不要
- 多品種アイテムを一型式で対応可能
- 指先のセンサで把持力の調整や把持/落下を検知
※センサ保護用の指サックは指紋のような滑り止めの役割もあります。
ピッキング動画
【開発直後の課題】
「これって12軸のサーボを制御するってことですよね?手間がかかりそう…」「簡単にできないの?」といったお声をお客様からもいただいていました。
把持をする姿勢すなわち、各指の位置を制御するにはPLCで12軸分の角度情報を入力する必要があります。現在位置はPRSハンド実機を都度見ながらの作業となりますので姿勢一つ作成するのに手間がかかっていました。これはPRSハンドの魅力である自由度の高い操作性とのトレードオフで起きた課題でした。
PRS-Aハンド操作サンプルソフトウェア
我々は皆さまにPRSの魅力を体感して欲しいと思い、シンプルに制御ができ各軸の現在位置情報などを数字で確認できる汎用的なソフトウェアをご用意しました。

機能一覧
- 姿勢変更(各軸JOG/インチング/角度指定)
- 姿勢登録/再現
- 把持(センサを使った握り込み)
- 原点復帰
- 状態表示
- アラームクリア
- フリードライブ
代表的な機能のご紹介
姿勢変更
ボタンを1回押すだけで十字姿勢と2対2姿勢になります。

インチング動作/各軸JOG動作
JOGボタンを押している間4本の指の第一関節と第二関節を閉じたり、開いたりと制御できるほか、特定の軸のみを選択し動かすことができます。
また、「Inching」に切り替えれば対象の軸を指定した角度だけ動かすことも可能です。
フリードライブ
我々は以前よりお客様から「様々な形状のアイテムを取り扱っていて、特に異形状のアイテムは専用のハンドや治具を設計する必要があり、困っている」というお声をよく聞いていました。
PRSのフリードライブ機能は、異形状のアイテムをピッキングさせたい時などに有効で、ロボットハンド本体に直接触れながら教示操作が可能な点が特長です。指の配置や角度を自由に動かしながら調整でき、直感操作で動かせるので、プログラム経験が少ない方でも安心して操作できます。
姿勢登録/再現
ハンド本体のメモリには100種類まで再現させたい姿勢を登録することができます。100種類の姿勢を再現することで、多品種のアイテムピッキングも一つのハンドで可能になります。このソフトウェアを使うことでPRSハンドの魅力である自由度の高さをさらに実感できます。
ピッキング失敗事例
これまでに様々なアイテムピッキング検証を繰り返して難しいと思われていた物もチャレンジしてきました。特に難しかったPRS-Aの可搬質量を超える2ℓペットボトルですが、把持する場所と指の姿勢を工夫すればピッキングは成功しました。しかし、ケーキのようなアイテムからの反発がなく形が崩れやすいものを掴むのは難しいということを実感しました。
アイテムピッキングの現場では必ずしもロボット側に有利な状態でピッキングできるとは限りません。アイテムピッキングの自動化には難しい課題を一つ一つクリアしていく必要があります。
自動化をお考えでPRSにご興味を持っていただいた皆様、ぜひTHKにお問い合わせいただければ幸いです。