2025年01月29日
製品
精密な位置決めの整定時間を短縮する技術 ~LMガイドと「転がりばね」の活用~
- 技術解説
- 一般産業機械
- 工作機械
- 産業用ロボット
- 半導体製造装置
- 搬送
- 高精度
- 高速化
位置決め技術は製造業において非常に重要な要素であり、特に精密な分解能が求められる現場では、所定位置に迅速かつ正確に停止する能力が求められます。このときに重要なのが「整定時間」です。整定時間とは、機械が目標位置に達するまでの微小な調整を繰り返す時間を指します。これが長引くと、製品の品質や製造効率に大きな影響を与えるため、整定時間の短縮は非常に重要です。今回のジャーナルでは、LMガイドを用いた精密な位置決めにおける整定時間を短縮するための制御技術について詳しくご紹介します。
制御ゲインの調整
位置決め整定時間を短縮する方法の一つに「制御ゲイン*の調整」があります。LMガイドでは、特に停止直前の低速状態で制御ゲインを大きくすることで整定時間を短縮することができます。通常、制御ゲインを大きく設定すると振動や不安定性が生じやすくなりますが、LMガイドの微小な運動時には転がりばねの特性が働くため、大きいゲイン設定でも振動やオーバーシュートが発生せず、安定した応答が得られます。
*ゲインとは、電気回路の増幅幅によって電気信号を増幅する値のことです。
「転がりばね」による位置決め技術で生産性向上に寄与
LMガイドの「転がりばね」とは、直線運動案内(Linear Motion Guide=LMガイド)において、ボールやローラーが転がる際に発生する弾性変形のことを指します。具体的には、ボールやローラーがレールと接触する際にわずかに変形し、その変形が元に戻る力が「ばね」のように働くことを意味します。この転がりばねの特性は、LMガイドの剛性や精度に影響を与えるため、設計や選定の際に重要な要素となります。そのため、LMガイドの「転がりばね」を利用した位置決め技術は、精密な位置決めを求められる製造業の現場で大きな成果を挙げています。これから順を追ってご説明する制御方法は、大きなゲインを設定することで精度を保ちながら整定時間を短縮できるという特長があり、特に高頻度の位置決め動作が求められる場面での生産性向上に寄与する技術です。
ステップ応答の実験から
この転がりばねの位置決め技術を検証するために、ステップ関数を入力した、ステップ応答の偏差を用いて実験をしてみました。
下の二つの図は、LMガイドを用いた1軸位置決め制御系における10μmのステップ応答を示しています。位置計測の分解能は1μmです。
図1は、位置比例ゲイン Kpが60 1/sの場合の応答です。
1次遅れ系(過渡状態での変化を表すシステムのひとつ)に似ている応答です。理想的な剛体系(どのような力を与えても変形しない物体のこと)で速度制御が十分に速ければ、時定数は16ms程度になるはずですが、こちらの時定数は150msと非常に遅いです。これはLMガイドの非線形摩擦特性によるものです。
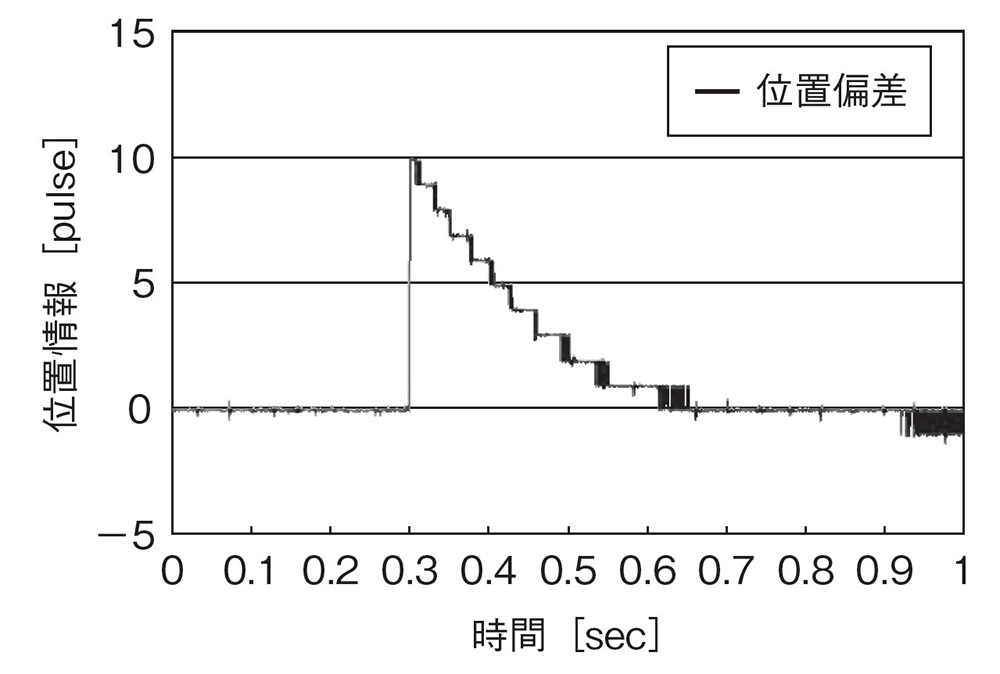
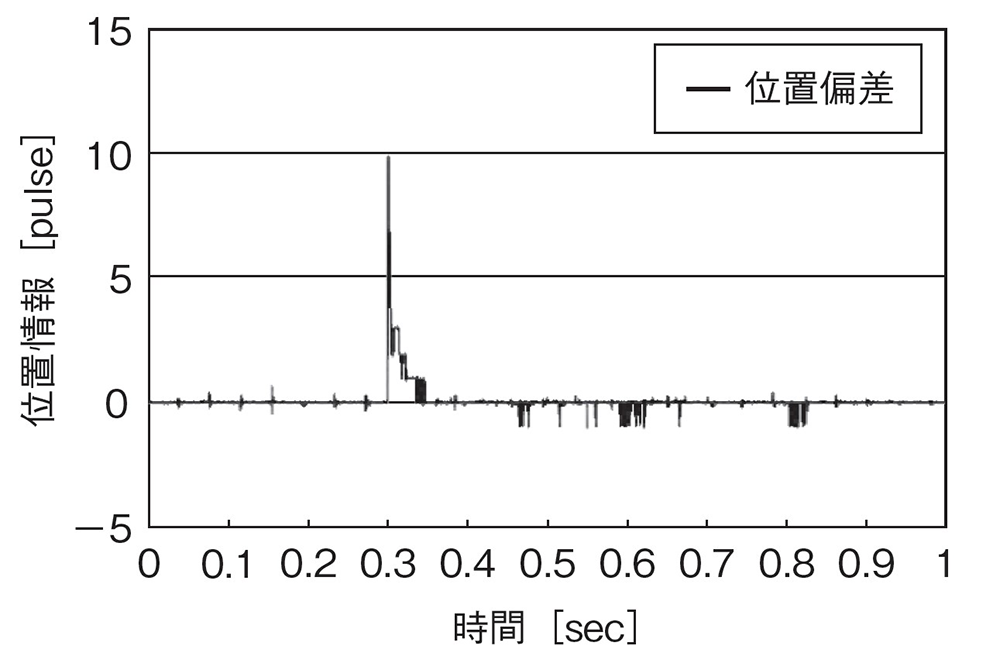
図2は、同システムで位置比例ゲインKpを1000 1/sと非常に大きな値に設定した場合の応答です。
このような大きなゲインは通常の系では設定できず、非常に振動的になるか、不安定になることがあります。それにもかかわらず、この場合の応答は10倍以上速くなります。さらに、振動やオーバーシュートもなく良好な応答形状を示しています。
LMガイドを用いた位置決め装置において微細な運動時には、大きな振幅の動作と同じ制御ゲインでは応答が遅くなります。一方で、大幅に大きな位置比例ゲインを設定することで、応答が非常に速くなり良好な応答を得ることができます。
この現象の基本となるのは、先ほど説明したLMガイドで運動方向が反転するときに生じる「転がりばね」現象です。この「転がりばね」は非常に硬いばね特性を持ち、ばね定数は10 N/μm程度にもなります。わずか数μm程度の有効範囲しかありませんが、位置決め整定時にはこの特性が決定的な役割を果たします。
この方法により、従来よりも10倍速く整定時間を短縮できることが実証されています。位置決めの頻度が高い工程では、この効果によって大幅な生産性向上が期待できます。
位置決め整定時間を3つの応答から比較する実験を実施
位置決め整定時間について、3つの応答から比較する実験を行いました。
3つの応答とは以下の通りです。
① 現行制御 (P,PI:閉ループ制御)
② 速度フィードフォワード制御 (P,PI:閉ループ制御+速度フィードフォワード制御)
③ THKが新提案する、位置偏差が小さくなったら制御ゲインを高ゲインに設定する方法
現行制御(P,PI:閉ループ制御)については以下の通りです。
閉ループ制御はP(位置)と PI(速度)を用いる
位置比例ゲインKpは60 1/s
速度比例ゲインKvは250 1/s
積分時間Tiは20m
以下の条件で閉ループ制御の実験を行いました。
運動指令パターン(台形)
ストローク200mm
加減速度10m/s²
加減速時間0.1s
一定速度1m/s
一定速度時間0.1s
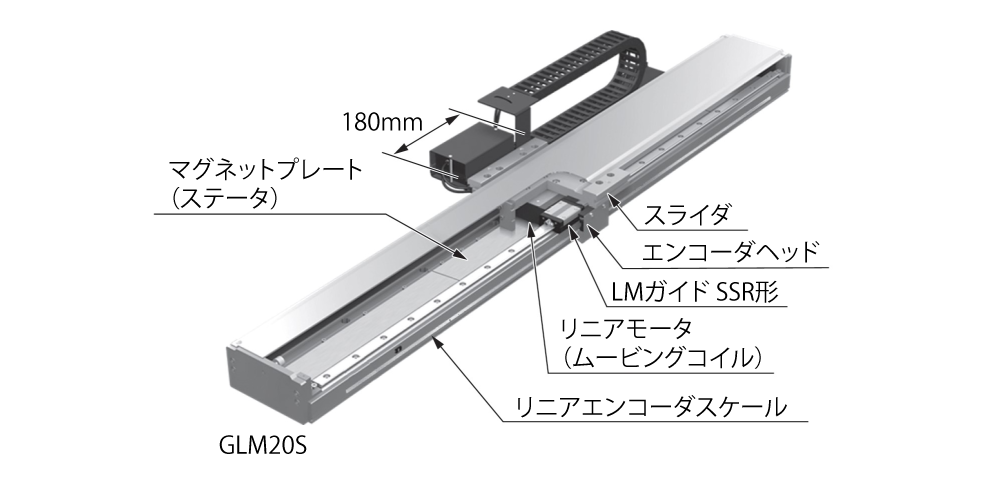
実験に使用した1軸位置決め装置(GLM20S形)について
装置の仕様:
ストローク1m
最大速度1m/s
位置決め分解能1μm
1軸位置決め装置に使用されているLMガイド SSR20形(ボールリテーナ付き)
指令払い出しについては以下の通りです。
指令の払い出しはスタート時点から0.3秒で完了します。
位置決め完了条件は、偏差±5パルスと±1パルスの2種類としました。
1パルスは1μmに相当します。
位置決め整定時間は、指令払い出し完了からそれぞれの位置決め完了幅以内に収まるまでの時間です。
実験で得られた結果
3つの制御法における位置決め整定時間(ms)は以下のとおりです。
| ① 現行(P,PI) | ② 速度フィードフォワード | ③ THKが新提案する制御法 | |
|---|---|---|---|
| ±5 pulse | 123 | 98 | 8.2 |
| ±1 pulse | 262 | 279 | 16.4 |
実験で得られた3つの応答を比較します。
① 現行条件:(P,PI)制御、Kp:60 1/s
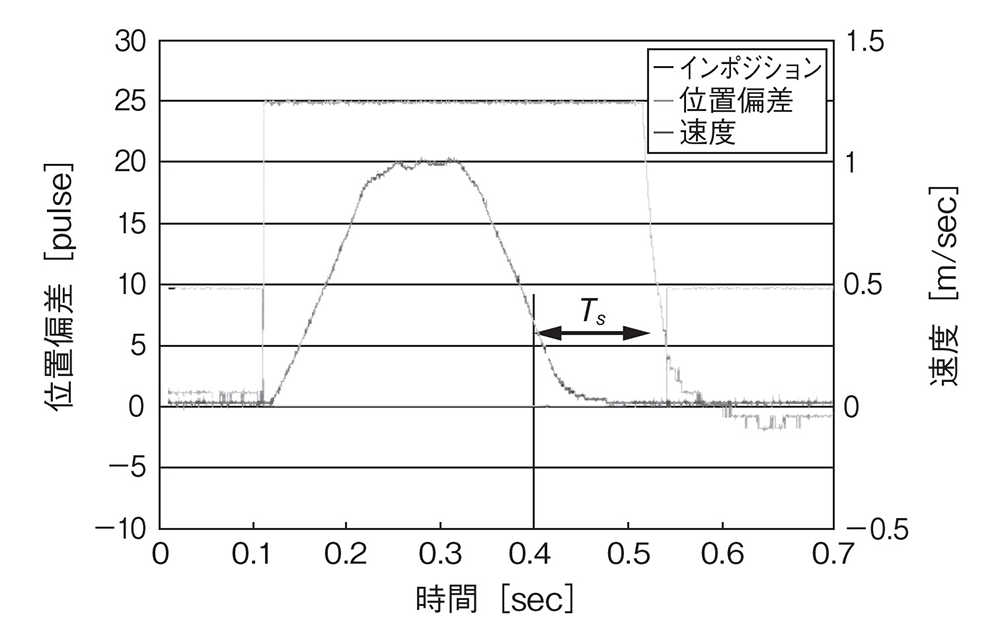
② 速度のフィードフォワード制御(100%)を加えた場合
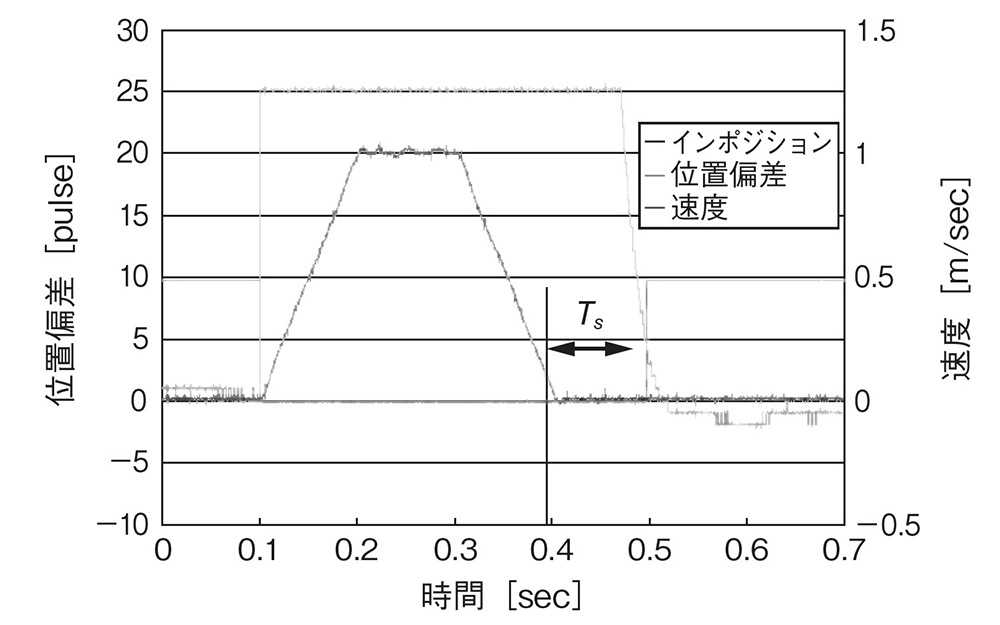
③ THKが新提案する制御方法の場合
位置決め整定時間が大幅に短縮されています。
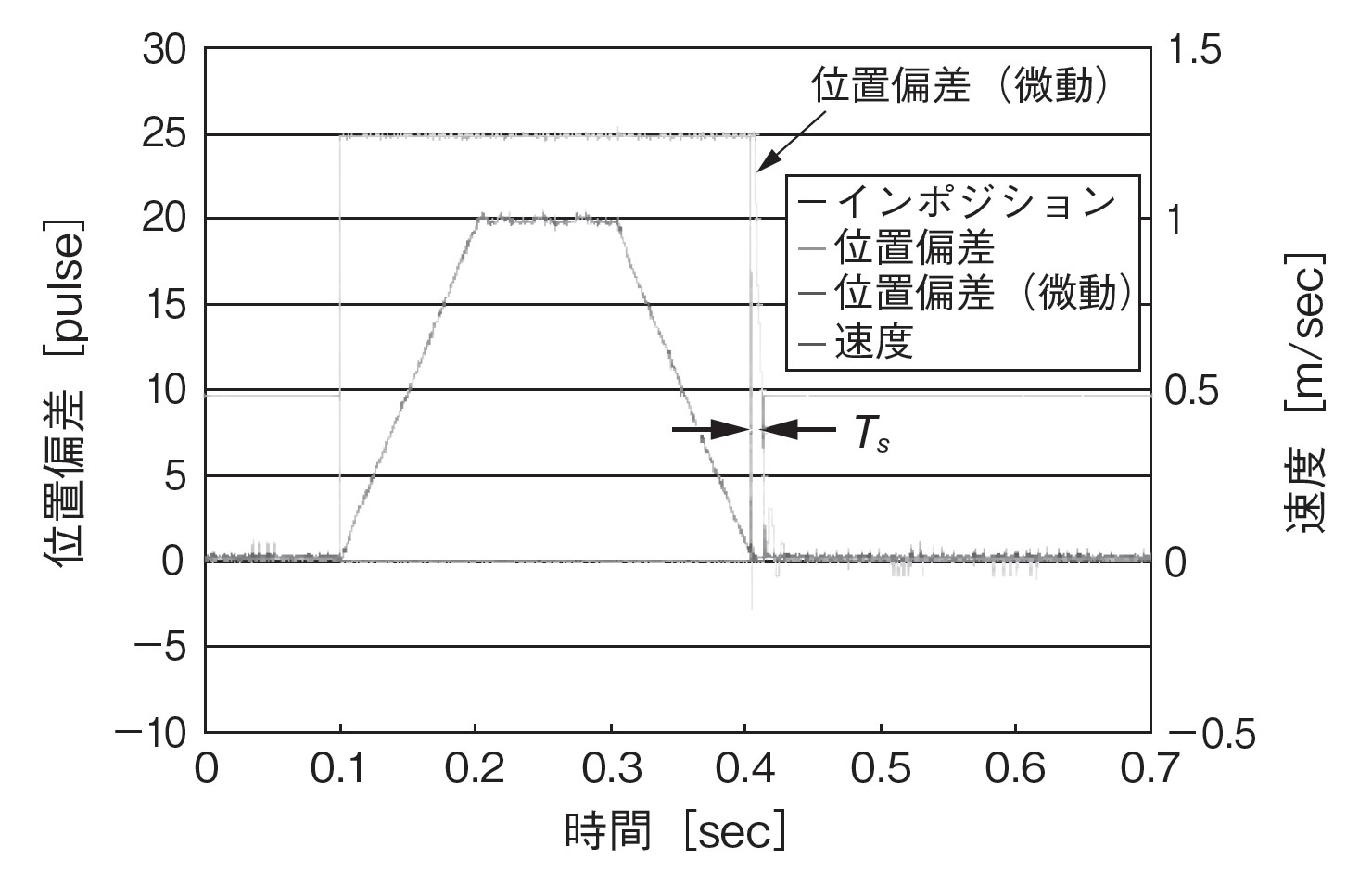
THKが新提案する制御方式では整定時間の大幅な短縮が実現され、整定時間はすべての条件で1/10以下にすることができました。この実験結果により、位置決め頻度が高い用途ではこの効果は大きいと説明できます。
※この記事は、「機械設計2024年10月号(発行:日刊工業新聞社)」に掲載されたこちらの論文を、製品ジャーナル記事として書き起こしたものです。
論文名:リニアボールガイドを用いた精密位置決め―“転がりばね”を利用した位置決め整定時間の短縮―
執筆者名:二見 茂<THK 技術本部 技術顧問、工学博士(東京工業大学)>
問い合わせ先
この記事に関するご意見・ご質問などはこちらから
お問い合わせフォーム