定格荷重
リニアモータは以下の手順に従って選定してください。
-
注1)
ご使用条件をご提示いただければTHKにて推奨形番を選定させていただきます。
詳しくは、THKまでお問い合わせください。
1 必要最大推力比の検討
モータの最大推力が使用上必要となる推力以上であることを確認します。
負荷変動を考慮して最大推力比80%以下※1で使用することを推奨します。
-
※1
CCMは90%以下
2 二乗平均推力比の検討
モータの定格推力が使用上必要となる二乗平均推力以上であることを確認します。
負荷変動を考慮して定格推力比
60%以下※2で使用することを推奨します。
-
※2
CCMは80%以下
-
※2
GLM15AP/20APは70%以下(天吊姿勢で使用される場合は、60%以下で使用することを推奨します。)
-
※2
ULM15/20は70%以下(天吊姿勢での使用は不可です。)
3 選定形番の仕様確認
上記で選定した形番の詳しい仕様を確認し、外形寸法、ストローク、最高速度、分解能、繰り返し位置決め精度等の必要仕様を満たすか確認します。
4 磁極検出動作の検討(GLM15AP/20AP+MR–J4仕様のみ)
磁極検出を正常に行うため、計算で求めた負荷力が定格推力の20%以下であることを確認します。
5 回生オプションの選定
動作条件により回生抵抗器が必要となる場合があります。
選定方法については、各形番の取扱説明書をご確認ください。
-
注2)
別途貴社にてケーブルチェーンを設置されるような場合には、検討条件の搭載質量にケーブルチェーンおよび挿入するケーブル質量も考慮の上、検討する必要があります。
計算式
計算条件
|
m1 |
搭載質量 |
[kg] |
|---|---|---|
|
m2 |
スライダ質量/ロッド質量 |
[kg] |
|
V |
動作速度 |
[m/s] |
|
g |
重力加速度(9.807m/s2) |
|
|
μ |
摩擦係数 |
|
|
α |
加速度 |
[m/s2] |
|
L |
ストローク |
[m] |
|
T |
1サイクル時間 |
[s] |
|
t1 |
加速時間 |
[s] |
|
t2 |
等速時間 |
[s] |
|
t3 |
減速時間 |
[s] |
|
t4 |
停止時間 |
[s] |
| 形番 | GLM | ULM | KLM | CLM |
|---|---|---|---|---|
| 摩擦係数:μ | 0.01 | 0.01 | 0.006 | 0.003 |
| 形番 | GLM10 | GLM15AP | GLM20AP | GLM25 | ULM15 | ULM20 | KLM46 | CLM60 | |
|---|---|---|---|---|---|---|---|---|---|
| モータ 形式※ |
Sタイプ | 0.6(0.5) | 2.3(2.2) | 5.3(5.1) | 25.3(25) | ー | ー | 4 | 4 |
| Mタイプ | 0.9(0.8) | 4.2(4.1) | 9.1(8.9) | 48.3(48) | 4.8(4.5) | 11.3(10.9) | 5 | 5.8 | |
| Lタイプ | ー | ー | 12.9(12.7) | ー | ー | ー | ー | 7.8 | |
-
※
( )内は磁極センサ無し仕様の値です。
| 形番 | CCM05S/M | CCM07S/M |
|---|---|---|
| 100mm当たりロッド質量 | 0.02 | 0.04 |
選定例1(GLM 水平使用)
以下にGLM15AP–Mタイプ(AC200V仕様)を使用し、質量2kgを下記動作パターンで駆動させることが可能であるかの検討を実施します。
-
選定形番 :
GLM15AP–Mタイプ AC200V仕様 磁極センサ付き
-
搭載質量 :
m1 =2[kg]
-
スライダ質量 :
m2 =4.2[kg]
-
動作速度 :
V =1[m/s]
-
加速度 :
α =10[m/s2]
-
ストローク :
L =0.3[m]
-
摩擦係数 :
μ =0.01
-
重力加速度 :
g =9.807[ m/s2]
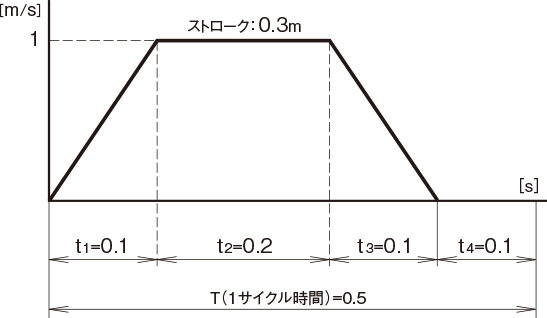
(1) 最大推力の検討
必要となる最大推力は、次式により求められる各値の最大値となります。
-
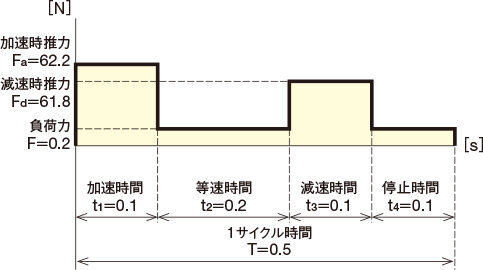
負荷力 :
F =μ×m1×g
=0.01×2×9.807
=0.2[N] -
加速時推力 :
Fa =(m1+m2)×α+F
=(2+4.2)×10+0.2
=62.2[N] -
減速時推力 :
Fd =(m1+m2)×α−F
=(2+4.2)×10−0.2
=61.8[N]
上記の結果より
-
必要最大推力 :
Fmax =Fa=62.2[N]
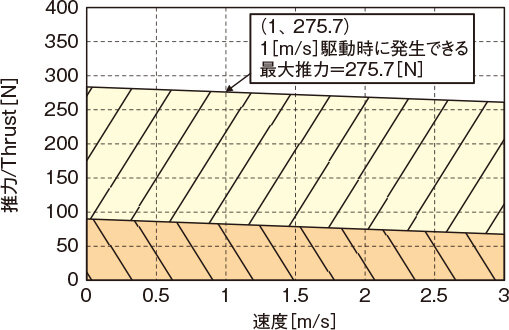
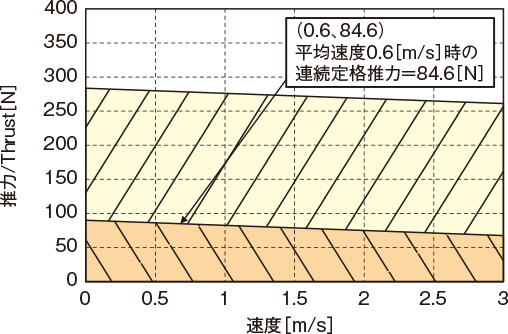
一方、GLM15AP–Mタイプの推力・速度特性図よりユニットの最大推力:Fpeak(V=1[m/s])の推力を読み取るとFpeak(V=1[m/s])=275.7[N]
従ってモータの最大推力に対する必要最大推力比は

ドライバ:TDP‒045CU‒200AC
(モータ吸引力は加味してあります)
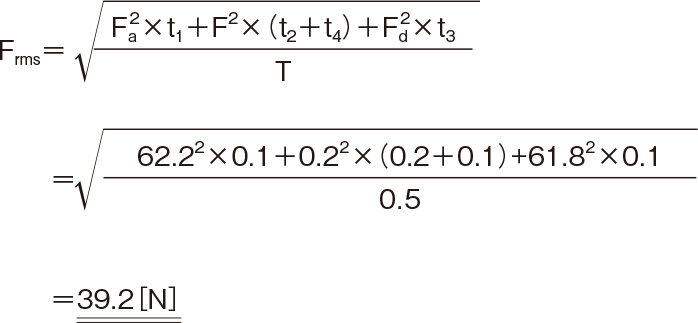
(2) 二乗平均推力比の検討
(1)で計算した負荷力、加速時推力、減速時推力および動作パターン内の各時間より、二乗平均推力を計算します。
二乗平均推力:
また、動作パターンより平均速度:Vaveを計算すると

一方、GLM15AP–Mタイプの推力・速度特性図よりユニットの連続定格推力:Fcont(Vave=0.6[m/s])の推力を読み取ると
Fcont=84.6[N]
従ってモータの連続定格推力に対する二乗平均推力比は

最大推力比および二乗平均推力比の検討結果より、動作可能と判断される。
ドライバ:TDP‒045CU‒200AC
(モータ吸引力は加味してあります)
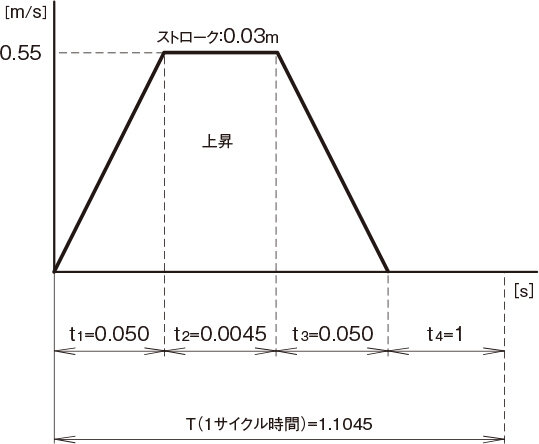
選定例2(CCM 水平使用)
以下にCCM07Sタイプ(DC48V駆動)を使用し、質量1kgを下記動作パターンで駆動させることが可能であるかの検討を実施します。
-
選定形番 :
CCM07S–038(DC48V駆動)
-
搭載質量 :
m1=1[kg]
-
ロッド質量 :
m2=0.0744[kg]
-
動作速度 :
V =0.55[m/s]
-
加速度 :
α =11[m/s2]
-
ストローク :
L =0.03[ m]
-
摩擦係数 :
μ =0.003
-
摺動抵抗 :
f =2[N]
-
重力加速度 :
g =9.807[m/s2]
-
注)
摺動抵抗fは、お客様の使用される直動案内により異なります。
(1)最大推力比の検討
必要となる最大推力は次の3式により求められた各値の最大値となります。
-
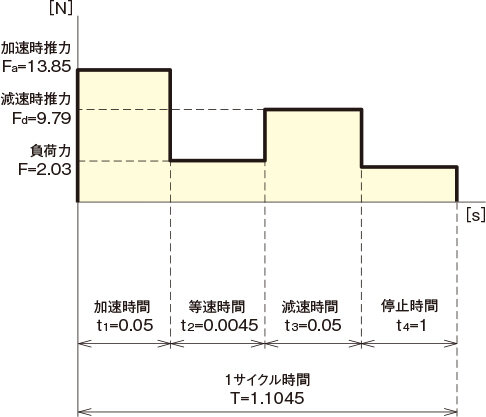
負荷力 :
F =μ×{(m1+m2)×g}+f
=0.003×{(1+0.0744)×9.807}+2
=2.03[N] -
加速時推力 :
Fa =(m1+m2)×α+F
=(1+0.0744)×11+2.03
=13.85[N] -
減速時推力 :
Fd =(m1+m2)×α−F
=(1+0.0744)×11−2.03
=9.79[N]
上記の計算結果より
-
必要最大推力 :
Fmax =Fa=13.85[N]
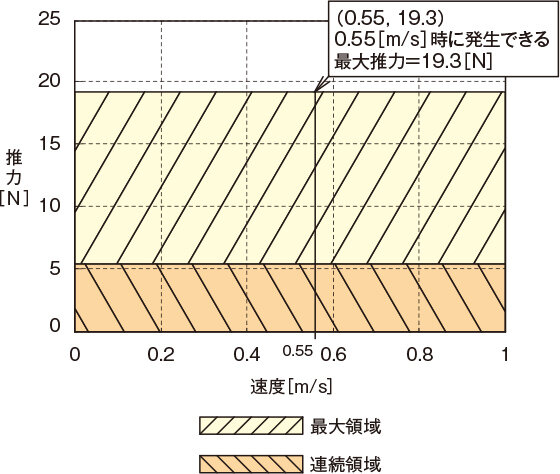
一方、CCM07Sタイプ(DC48V駆動)の推力・速度特性図より
モータの最大推力:Fpeak(V=0.55[m/s])の推力を読み取ると
Fpeak(V=0.55[m/s])=19.3[N]
従ってモータの最大推力に対する最大推力比は

ドライバ :MD‒001‒048DC
(2)二乗平均推力比の検討
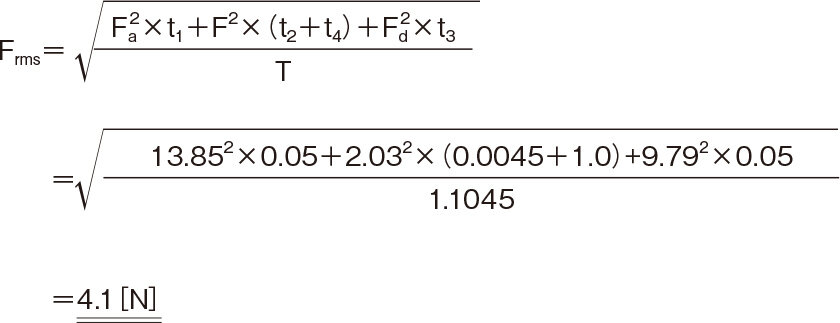
(1)で計算した負荷力、加速時推力、減速時推力および動作パターン内の各時間より二乗平均推力を計算します。
二乗平均推力:
また、動作パターンより平均速度:Vaveを計算すると

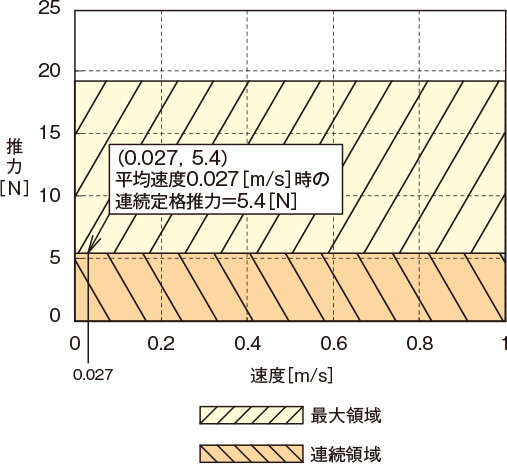
一方、CCM07Sタイプ(DC48V駆動)の推力・速度特性図より
モータの連続定格推力:Fcont(Vave=0.027[m/s])の推力を読み取ると
Fcont=5.4[N]
従ってモータの連続定格推力に対する二乗平均推力比は

最大推力比および二乗平均推力比の検討結果より、動作可能と判断される。
-
注)
ドライバMDをご使用になる場合、外付け回生抵抗は必要ありません。
ドライバ :MD‒001‒048DC
選定例3(CCM 垂直使用)
以下にCCM05Mタイプ(DC24V駆動)を使用し、質量0.2kgを下記動作パターンで駆動させることが可能であるかの検討を実施します。
-
選定形番 :
CCM05M–032(DC24V駆動)
-
搭載質量 :
m1 =0.2[kg]
-
ロッド質量 :
m2 =0.043[kg]
-
動作速度 :
V =0.45[m/s]
-
加速度 :
α =10[m/s2]
-
ストローク :
L =0.025[m]
-
摺動抵抗 :
f =1[N]
-
重力加速度 :
g =9.807[m/s2]
-
注)
摺動抵抗fはお客様の使用される直動案内により異なります。
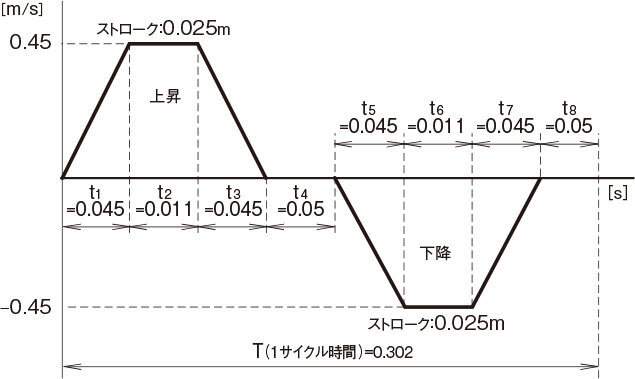
(1)最大推力比の検討
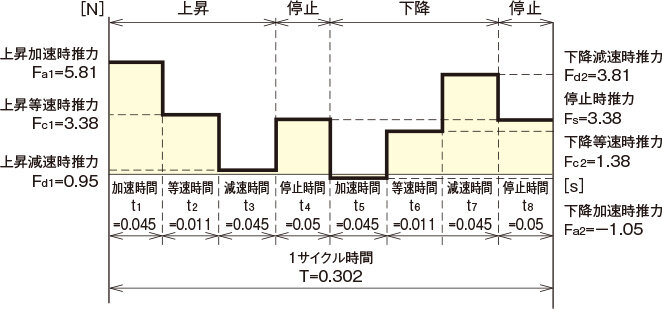
必要となる最大推力は次の8式により求められた各値の最大値となります。
-
負荷力 :
F =(m1+m2)×g
=(0.2+0. 043)×9.807
=2.38[N] -
上昇加速時推力 :
Fa1 =(m1+m2)×α+F+f
=(0.2+0.043)×10+2.38+1
=5. 81[N] -
上昇等速時推力 :
Fc1 =(m1+m2)×g+f
=(0.2+0.043)×9.807+1
=3.38[N] -
上昇減速時推力 :
Fd1 =(m1+m2)×(−α)+F+f
=(0.2+0.043)×(−10)+2.38+1
=0.95[N] -
下降加速時推力 :
Fa2 =(m1+m2)×(−α)+F−f
=(0.2+0.043)×(−10)+2.38−1
=−1.05[N] -
下降等速時推力 :
Fc2 =(m1+m2)×g−f
=(0.2+0.043)×9.807−1
=1.38[N] -
下降減速時推力 :
Fd2 =(m1+m2)×α+F−f
=(0.2+0.043)×10+2.38−1
=3.81[N] -
停止時推力 :
Fs =(m1+m2)×g+f
=(0.2+0.043)×9.807+1
=3.38[N]
上記の計算結果より
-
必要最大推力:
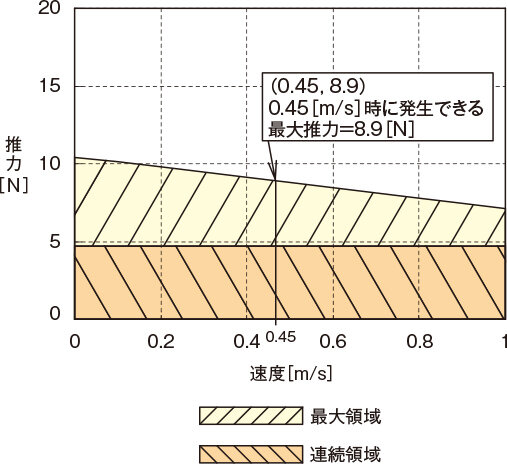
Fmax=Fa1=5.81[N]
一方、CCM05Mタイプ(DC24V駆動)の推力・速度特性図より
モータの最大推力:Fpeak(V=0.45[m/s])の推力を読み取ると
Fpeak(V=0.45[m/s])=8.9[N]
従ってモータの最大推力に対する最大推力比は

ドライバ :MD‒001‒024DC
(2)二乗平均推力比の検討
(1)で計算した停止時推力、加速時推力、減速時推力および動作パターン内の各時間より二乗平均推力を計算します。
二乗平均推力:
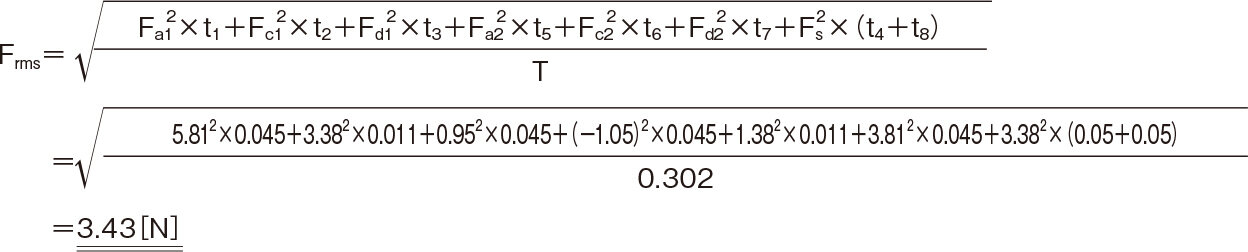
また、動作パターンより平均速度:Vaveを計算すると

一方、CCM05Mタイプ(DC24V駆動)の推力・速度特性図より
モータの連続定格推力:Fcont(
Vave=0.166[m/s])の推力を読み取ると
Fcont=4.7[N]
従ってモータの連続定格推力に対する二乗平均推力比は

ドライバ :MD‒001‒024DC
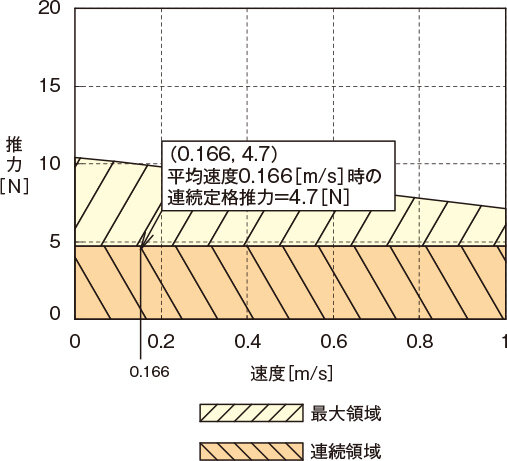
最大推力比および二乗平均推力比の検討結果より、動作可能と判断される。
-
注)
ドライバMDをご使用になる場合、外付け回生抵抗は必要ありません。
1. 必要最大推力比の検討
必要となる最大推力は、次の3式により求められた各値の最大値となります。
負荷力:F
-
(GLM、ULM、KLM)
F=μ×m1×g
-
(CLM)
F=μ×(m1+m2)×g
-
(CCM)
F=μ×{(m1+m2)×g }+f
-
注1)
各形番により異なります。
-
注2)
CCMの摺動抵抗fは、お客様の使用される直動案内により異なります。
加速時推力:Fa
-
(全形番共通)
Fa=(m1+m2)×α+F
減速時推力:Fd
-
(全形番共通)
Fd=(m1+m2)×α−F
必要最大推力 Fmax=上記F、 Fa、 Fdの最大値
各形番基本仕様ページ記載の推力・速度特性図より、
動作速度時のモータ、またはアクチュエータの最大推力:Fpeakを読み取る。

2. 二乗平均推力比の検討
1.で計算した負荷力、加速時推力、減速時推力および動作パターン内の各時間により二乗平均推力を計算します。
二乗平均推力:Frms

また、動作パターンより平均速度:Vaveを計算
平均速度:Vave

各形番基本仕様ページ記載の推力・速度特性図より、モータの連続定格推力:Fcontを読み取る。

3. 磁極検出動作の検討(GLM15AP、GLM20AP(MR–J4仕様時)のみ)
計算で求めた負荷力Fが基本仕様記載の定格推力の20%以下か確認する。

最大推力比、二乗平均推力比および磁極検出動作確認の結果より、仕様を満たすか確認する。