


Wyzwania i rozwiązania w zakresie montażu chipów półprzewodnikowych

Ilustracja 1: Montaż chipów półprzewodnikowych
W niniejszym artykule przedstawiono przegląd procesów produkcyjnych i urządzeń stosowanych w produkcji chipów półprzewodnikowych, a następnie podano przykłady produktów codziennego użytku, w których wykorzystuje się te chipy. Następnie omówiono główne wyzwania związane z montażem chipów półprzewodnikowych oraz przedstawiono metody minimalizacji uszkodzeń. Na podstawie praktycznych przykładów zastosowań zaprezentowano wykorzystanie robota montażowego (PPR) firmy THK.
Mamy nadzieję, że niniejszy artykuł okaże się praktyczną pomocą zarówno dla młodych inżynierów rozpoczynających karierę w branży półprzewodników, jak i dla doświadczonych specjalistów, którzy już zmagają się z wyzwaniami związanymi z procesem umieszczania chipów.
Półprzewodniki jako podstawowa technologia przemysłowa
Półprzewodniki są często określane jako podstawowa dziedzina przemysłu. O ich znaczeniu świadczy szeroki zakres zastosowań. Procesory (CPU) są wbudowane w niemal wszystkie smartfony i komputery, a nowoczesne systemy często wykorzystują wiele procesorów lub architektury wielordzeniowe w celu wydajnego przetwarzania danych. W złożonych zastosowaniach, takich jak pojazdy, wykorzystuje się również liczne procesory, z których każdy pełni określoną funkcję.
Oprócz procesorów niezbędne są również komponenty pamięci, ponieważ przechowują one dane tymczasowo lub na stałe podczas przetwarzania. Czujniki stanowią kolejny kluczowy obszar zastosowań: czujniki obrazu, fotograficzne, przyspieszenia i ciśnienia rejestrują wielkości fizyczne i przekształcają je w informacje cyfrowe wykorzystywane w wielu produktach konsumenckich i przemysłowych.
Półprzewodniki wywarły również znaczący wpływ na technologię oświetleniową. Ze względu na swoją wydajność, długą żywotność i kompaktową konstrukcję diody LED w dużej mierze zastąpiły konwencjonalne źródła światła i są obecnie szeroko stosowane w pojazdach, infrastrukturze i wyświetlaczach.
Ogólnie rzecz biorąc, przykłady te ilustrują kluczową rolę, jaką półprzewodniki odgrywają w życiu codziennym.
Ilustracja 2: Zastosowania półprzewodników
Układy półprzewodnikowe i ich produkcja
Półprzewodniki wytwarza się początkowo z materiału na bazie krzemu¹. Bloki krzemu monokrystalicznego, zwane wlewkami, są cięte na cienkie płytki. Płytki te przechodzą następnie etapy obróbki wstępnej, takie jak nanoszenie wzoru i rozdzielanie matryc, w ramach których płytka jest dzielona na pojedyncze, funkcjonalne mikrochipy. Mikrochipy te nazywane są układami półprzewodnikowymi lub matrycami. Termin „chip” odzwierciedla fakt, że są to małe kawałki lub fragmenty większego wlewka krzemowego, natomiast termin „die” oznacza kwadratowy lub sześcienny kawałek materiału, podobny kształtem do kostki do gry – stąd termin „die singulation” (wyodrębnianie matryc).
Na tym etapie matryce są oddzielone, ale nie mogą być jeszcze bezpośrednio wykorzystane w obwodzie2. Muszą najpierw zostać zamontowane na spolaryzowanej ramce wyprowadzeniowej lub w obudowie półprzewodnikowej, która łączy się z obwodem. Ten etap nazywa się łączeniem matryc, podczas którego matryca jest mocowana poprzez lutowanie lub klejenie.
W kolejnym procesie łączenia drutowego matryca jest elektrycznie połączona z ramką wyprowadzeniową lub obudową za pomocą cienkich drutów metalowych. W tym momencie zarówno druty, jak i powierzchnia chipa półprzewodnikowego są odsłonięte i wymagają ostrożnego obchodzenia się z nimi. Aby zapewnić ochronę mechaniczną i stabilność, w następnym etapie – tzw. formowaniu – nakłada się żywicę, tworząc ochronną obudowę.
(1) Wykorzystuje się również inne materiały.
(2) W momencie pisania tego artykułu znana jest również technika zwana łączeniem typu flip-chip.
Ilustracja 3: Proces produkcji półprzewodników
Wśród różnych maszyn wykorzystywanych na poszczególnych etapach tego procesu znajdują się maszyny do cięcia (dicers) służące do oddzielania poszczególnych elementów, maszyny do łączenia elementów (die bonders) służące do umieszczania elementów (mikrochipów), sortowniki3 służące do wstępnego sortowania elementów przed ich połączeniem oraz maszyny do łączenia drutowego (wire bonders).
(3) Sortowniki mogą usuwać chipy, które podczas testowania zostały zidentyfikowane jako wadliwe.
Wyzwania związane z obsługą chipów półprzewodnikowych
Wróćmy do procesów, w których płytki są dzielone na pojedyncze chipy, a następnie chipy te są pobierane. Podczas oddzielania chipów, płytki są mocowane do taśmy klejącej, aby zapobiec rozrzucaniu się chipów podczas cięcia. Po zakończeniu procesu cięcia chipy oddzielone od płytki są chwytane przez narzędzie pobierające i podnoszone z taśmy klejącej.
Ze względu na właściwości fizyczne krzemu materiał ten może pękać lub ulegać złamaniom nawet przy niewielkich uderzeniach. Stwarza to ryzyko uszkodzenia chipów, które pomyślnie przeszły już poprzednie etapy przetwarzania. Aby zmniejszyć to ryzyko, taśma klejąca przymocowana do płytki jest rozciągana (rozszerzanie taśmy), a kołki wyrzutowe podnoszą chipy lekko od spodu, pojedynczo. Pozwala to narzędziom do pobierania na łatwiejsze i delikatniejsze oddzielanie chipów od taśmy klejącej.
Zdjęcie 4: Rozciąganie taśmy i podnoszenie chipów półprzewodnikowych za pomocą narzędzia do pobierania
Podnoszenie chipów za pomocą trzpieni wyrzutowych ułatwia usuwanie taśmy klejącej, jednak wymaga to bardzo precyzyjnego i zaawansowanego technologicznie wykonania. Proces ten komplikują następujące czynniki:
1. Chipy mają bardzo małą grubość i są bardzo wrażliwe na obciążenia mechaniczne.
2. Sworznie wyrzutowe i narzędzia do podnoszenia muszą być precyzyjnie zsynchronizowane w czasie i przestrzeni.
3. Zużycie może powodować niewspółosiowość sworzni wyrzutowych i tulei zaciskowych4 względem płytek.
4 W przemyśle półprzewodników i komponentów elektronicznych dysza ssąca nazywana jest tuleją zaciskową. Poniżej omówiono bardziej szczegółowo poszczególne czynniki komplikujące ten proces.
1. Cienkie i niezwykle wrażliwe chipy
Jak wspomniano powyżej, wlewki są cięte na cienkie plasterki w celu wytworzenia płytek półprzewodnikowych. Im cieńsze są te płytki, tym więcej płytek można uzyskać z jednego wlewka, co zmniejsza koszt jednostkowy płytki. Ponadto mniejsze i cieńsze elementy półprzewodnikowe wymagają mniejszego obszaru i objętości podczas montażu na płytce drukowanej. Wszystko to przyczynia się do tego, że gotowe urządzenie elektroniczne jest bardziej kompaktowe, a produkt końcowy bardziej przyjazny dla użytkownika.
Podczas gdy wiele chipów jest cienionych do grubości od 0,5 mm do 1,0 mm ze względu na wytrzymałość mechaniczną i łatwiejszą obsługę, niektóre najnowocześniejsze chipy mogą mieć grubość zaledwie około 20 µm.
2. Zsynchronizowany ruch trzpienia wyrzutnika i narzędzia do podnoszenia
Trzpień wyrzutnika jest przesuwany w górę od spodu płytki półprzewodnikowej za pomocą silnika serwo lub innego mechanizmu napędowego. Tuleja zaciskowa w zespole podnoszącym jest również napędzana przez silnik serwo lub inny siłownik, ale porusza się w dół. Sekwencja podnoszenia chipa półprzewodnikowego wygląda następująco:
1. Tuleja zaciskowa jest opuszczana w kierunku chipa przy jednoczesnym podłączeniu próżni.
2. Trzpień wyrzutnika zostaje podniesiony.
3. Trzpień wyrzutnika i tuleja zaciskowa są podnoszone jednocześnie.
4. Tuleja zaciskowa kontynuuje ruch w górę i podnosi chip.
Podczas tego procesu chip poddawany jest zarówno naprężeniom spowodowanym kontaktem z tuleją zaciskową i trzpieniem wyrzutnika, jak i siłom wynikającym z zaciśnięcia między nimi. Aby ograniczyć uszkodzenia tych cienkich chipów półprzewodnikowych, wymagana jest bardzo precyzyjna kontrola położenia, kontrola prędkości oraz zsynchronizowany ruch wzdłuż osi pionowej.
Zgodnie z naszymi badaniami nawet zaciśnięcie o zaledwie kilkadziesiąt mikrometrów powoduje obciążenia rzędu kilkuset gramów, co sprawia, że ścisła kontrola położenia jest niezbędna.
3. Zużycie może wpłynąć na zmianę wzajemnego położenia trzpienia wyrzutnika i tulei zaciskowej względem chipu
Trzpienie wyrzutnika i tuleje zaciskowe stykają się z chipami tysiące, a nawet dziesiątki tysięcy razy dziennie, co z czasem powoduje ich stopniowe zużycie. Aby przeciwdziałać temu zużyciu, do produkcji tych elementów stosuje się metale twarde, a nawet diamenty. Niemniej jednak końcówki tych części mogą ulegać odkształceniom, zmieniając ich wzajemne położenie względem chipów. Może to prowadzić zarówno do błędów wyrzucania, jak i uszkodzeń przenoszonych chipów.
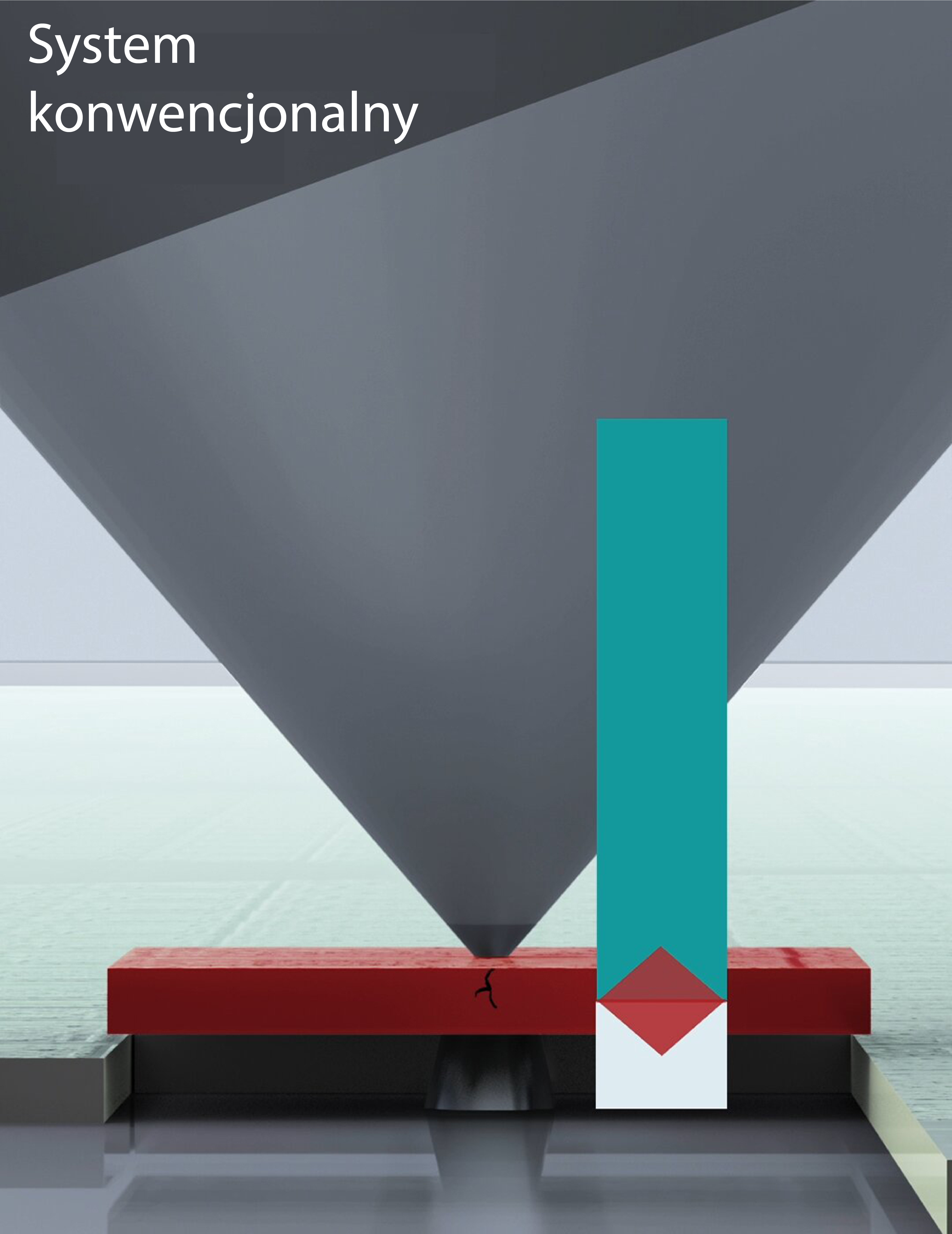
Zdjęcie 5: Obciążenia udarowe spowodowane zakleszczeniem wynikającym z braku możliwości regulacji podczas podnoszenia za pomocą sworznia wyrzutnika
Zalety robota typu „pick and place” PPR
Jako zintegrowany system, PPR jest wyposażony w silnik liniowy i enkoder dla osi Z, a także w czujnik siły, dzięki czemu idealnie nadaje się do szerokiego zakresu procesów związanych z podnoszeniem chipów półprzewodnikowych.
Dzięki funkcji zatrzymania kontaktowego, która uruchamia się natychmiast po zetknięciu się tulei zaciskowej z chipem półprzewodnikowym, PPR zmniejsza obciążenie udarowe działające na chip. Ta sama funkcja może również zapobiegać wahaniom intensywności tego obciążenia udarowego, takim jak te, które mogą wystąpić z powodu przesunięć tulei zaciskowej spowodowanych zużyciem. Ponieważ PPR może rejestrować informacje o położeniu z dokładnością do mikrometra, jest ponadto w stanie wykrywać takie zużycie tulei zaciskowej poprzez sprawdzenie jej położenia w momencie zetknięcia się z chipem.
Na tej stronie można znaleźć studium przypadku dotyczące proponowanego rozwiązania, w którym określenie wysokości odbywa się przy użyciu informacji o położeniu.
Wykorzystując funkcję kontroli siły docisku PPR do synchronizacji z kołkami wyrzutnika, można utrzymać stałe, z góry określone obciążenie podnoszonych chipów. Pozwala to uniknąć obciążeń udarowych podczas podnoszenia chipów, które przekraczałyby ustawione obciążenie, nawet jeśli ruch wzdłuż osi pionowej nie jest zsynchronizowany z wysoką precyzją.
Na tej stronie można znaleźć studium przypadku dotyczące proponowanego rozwiązania, które pokazuje działanie czujników siły wykorzystywanych do kontroli siły docisku.

Ilustracja 6: Amortyzacja wstrząsów poprzez eliminację sił nakładających się podczas podnoszenia chipów
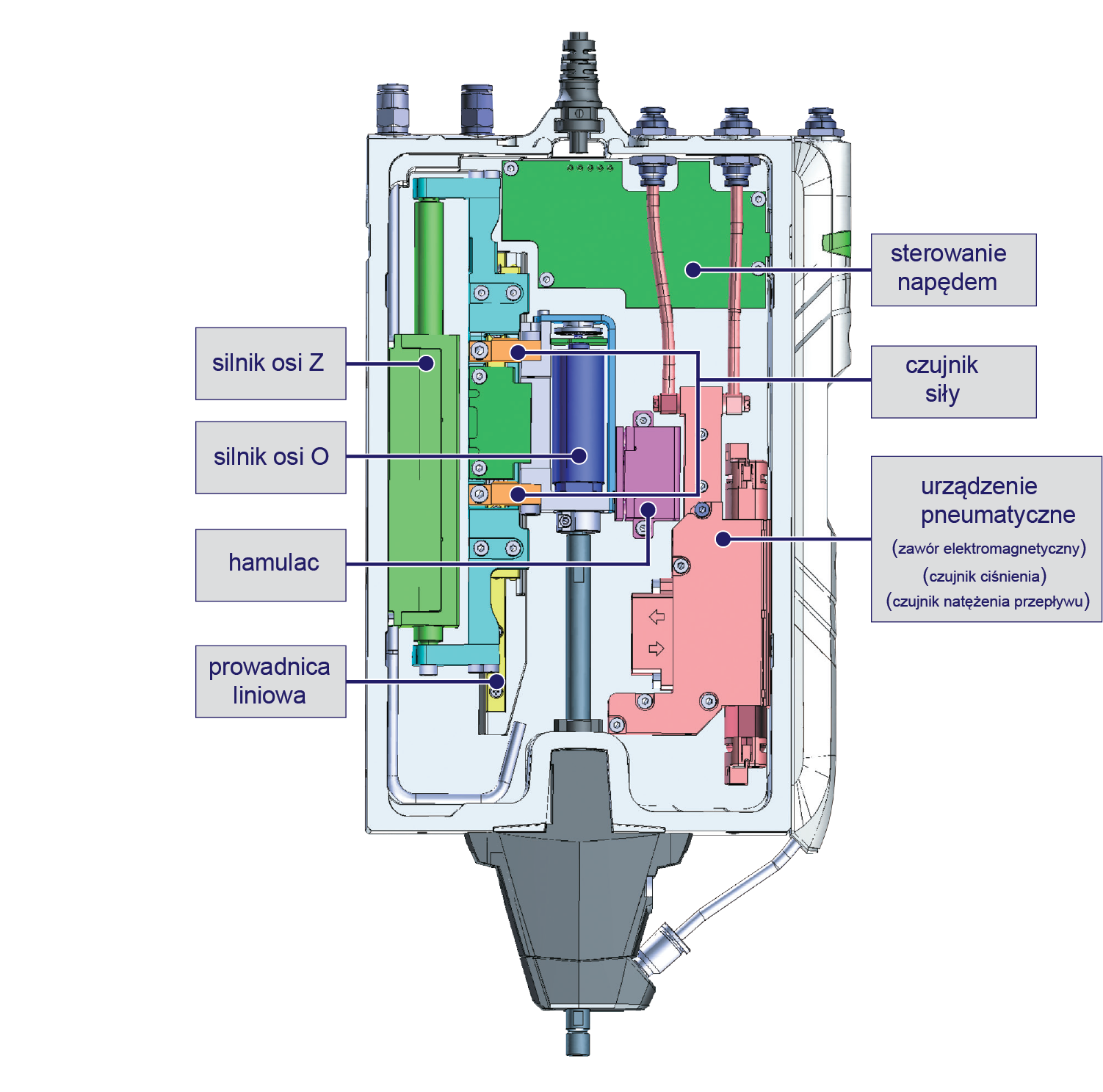
Ilustracja 7: Budowa robota Pick and Place PPR
Zwiększanie wydajności produkcji półprzewodników
Tym razem skupiono się na sposobie podnoszenia chipów półprzewodnikowych podczas przetwarzania. Przeanalizowano zarówno wyzwania związane z zapobieganiem uszkodzeniom, jak i usprawnienia procesowe możliwe dzięki robotowi Pick and Place PPR. Jak opisano w pierwszej części tego artykułu, półprzewodniki stanowią podstawowy element współczesnych technologii. Wraz ze wzrostem wymagań funkcjonalnych wobec urządzeń takich jak smartfony pojawia się potrzeba tworzenia coraz mniejszych i cieńszych półprzewodników. Jednak opinie użytkowników wskazują, że wielu producentów sprzętu i maszyn napotyka w tym zakresie poważne trudności.
Zakłada się, że robot PPR, w połączeniu z innymi technologiami THK, może pomóc w pokonaniu tych wyzwań i wesprzeć dalszy rozwój procesów w branży półprzewodników.
W celu uzyskania dalszych informacji lub wsparcia technicznego prosimy o kontakt z firmą THK.
THK GmbH
PR Group
Kaiserswerther Strasse 115,
40880 Ratingen, Germany
Tel: +49 2102 7425 555
E-mail: press@thk.eu
www.thk.com