


Robot industriali
I robot vengono utilizzati in vari settori industriali per posizionare pezzi di lavorazione in modo rapido e accurato. Alcuni robot hanno una struttura multi articolata che, non limitandosi ai movimenti ortogonali, consente di simulare le azioni delle braccia umane. Queste sezioni a più giunti devono essere caratterizzate da un'alta precisione di oscillazione e da un'elevata rigidezza in modo che, anche in caso di interruzioni improvvise, non subiscano disassamenti. Gli esclusivi prodotti THK sono dotati della potenza e delle dimensioni necessarie per soddisfare queste esigenze.
Robot a 5 giunti chiusi
Robot di posizionamento che sfidano i limiti di accelerazione e decelerazione. La sezione di guida deve essere caratterizzata da precisione e rigidezza e la struttura di base deve presentare ottime proprietà di attenuazione durante gli arresti. Al fine di ottenere questi livelli di rigidezza e velocità, nella sezione di oscillazione vengono utilizzati i cuscinetti a rulli incrociati.
Robot per la saldatura ad arco
I cuscinetti a rulli incrociati vengono utilizzati nella sezione dei giunti a moto rotatorio dei robot per la saldatura ad arco impiegati nelle catene di montaggio industriali. Dato che i cuscinetti a rulli incrociati stessi sono dotati di sufficiente rigidezza nella direzione di ogni carico di momenti radiali e assiali, è possibile utilizzarli per la realizzazione dei giunti di robot compatti.
Robot scara
I robot scara vengono utilizzati per trasportare e posizionare pezzi di lavorazione in piccole aree di lavoro. I sistemi di guida LM diventano elementi essenziali dove sono necessari alta velocità e un basso runout, grazie alla loro elevata precisione nel movimento e nella rotazione della corsa sull'asse Z.
Robot a doppio braccio
I robot a doppio braccio, progettati per simulare i movimenti delle braccia umane, devono essere in grado di eseguire ripetitivamente operazioni complesse in modo uniforme. Inoltre, devono essere caratterizzati da rigidezza e tempi di risposta veloci. I sistemi di moto lineare e i cuscinetti a rulli incrociati di THK consentono di ridurre le dimensioni dei robot, aumentando al contempo la loro rigidezza e velocità operativa.
Prodotti utilizzati

Guida LM
La guida LM è il nostro prodotto principale che, per la prima volta al mondo, incorpora il moto di rotolamento lineare, rendendola così adatta al suo utilizzo nelle macchine industriali.
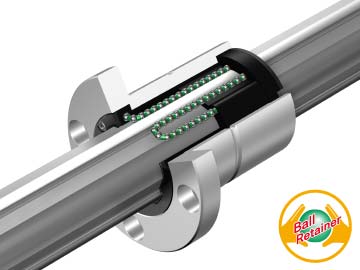
Albero scanalato e scanalato lobato
Gli alberi scanalati e scanalati lobati sono sistemi per il moto lineare a rotolamento di sfere sulle piste dell'albero rettificate ad alta precisione.

Cuscinetto a rulli incrociati
Il cuscinetto a rulli incrociati è caratterizzato da un'elevata precisione di rotazione ed è in grado di supportare carichi in tutte le direzioni grazie alla disposizione ortogonale dei rulli cilindrici.

Accessori di lubrificazione
È disponibile un assortimento di prodotti di lubrificazione ideati per garantire una sufficiente lubrificazione delle macchine.
