


Промышленные роботы
Роботы используются в различных отраслях промышленности для очень быстрого и точного позиционирования обрабатываемых деталей. Некоторые роботы, возможности которых не ограничиваются перпендикулярными перемещениями, оснащены многошарнирными блоками, которые позволяют им имитировать движения человеческих рук. Эти шарнирные секции должны обладать высокой точностью поворотов и большой прочностью во избежание выхода из строя в результате внезапной остановки. Уникальные продукты THK обладают необходимыми характеристиками производительности и являются достаточно компактными для удовлетворения этих требований.
5-шарнирные роботы с замкнутой цепью
Это роботы для позиционирования, которые преодолевают силы инерции при ускорении и замедлении. Направляющая секция должна отличаться точностью и прочностью, а каркас должен обеспечивать превосходное демпфирование во время остановки. В поворотной секции используются подшипники с перекрестными роликами, обеспечивающие подобную прочность и скорость перемещения.
Роботы для дуговой сварки
В поворотных секциях соединительных узлов роботов для дуговой сварки, применяемых на заводских производственных линиях, используются подшипники с перекрестными роликами. Поскольку сами по себе подшипники с перекрестными роликами обладают достаточной жесткостью и не сгибаются при приложении любой нагрузки в ходе перемещения вдоль оси и вращения, они могут использоваться для создания компактных соединительных узлов роботов.
Скалярные роботы
Скалярные роботы используются для транспортировки и размещения обрабатываемых деталей в небольших рабочих зонах. Системы направляющих LM имеют критическое значение для обеспечения высокой точности тактовых движений и поворотов по оси Z, которые должны выполняться с высокой скоростью и низкой степенью сдвига.
Роботы с двумя манипуляторами
Роботы с двумя манипуляторами, имитирующие движения человеческих рук, должны обладать возможностью плавного и бесперебойного выполнения многократно повторяющихся комплексных операций. Кроме того, такие роботы должны характеризоваться прочностью и высокоскоростной реакцией. Использование систем линейного перемещения и подшипников с перекрестными роликами THK позволяет уменьшить размер роботов с одновременным повышением их прочности и скорости работы.
Используемые продукты

Направляющая LM
Направляющая LM является одним из основных видов нашей продукции.
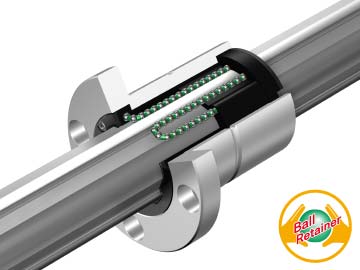
Шлицевой вал с шариковой втулкой
Шлицевой вал с шариковой втулкой — это циркуляционная шариковая направляющая.

Подшипник с перекрестными роликами
Подшипник с перекрестными роликами — это поворотный роликовый подшипник, имеющий высокую точность вращения.

Принадлежности для смазки
Доступен ассортимент товаров, обеспечивающих надлежащее смазывание и работоспособность в течение всего срока службы.