

PPR-LR3-LF1(位置控制专用机型)

| 功能 | PPR-LR3-LF1 (位置控制专用机型) |
|---|---|
| Z轴行程 | 30mm |
| Z轴分辨率 | 1μm |
| R轴行程 | 360° |
| R轴分辨率 | 0.01° |
| 可搬送质量 | 80g |
| 厚度 | 15mm |
| 力传感器分辨率 | - |
| 内置空压模块 | 有 |

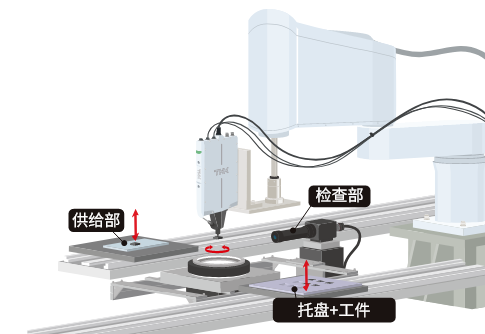
位置控制取放应用场景
检查工序
水平多关节机器人
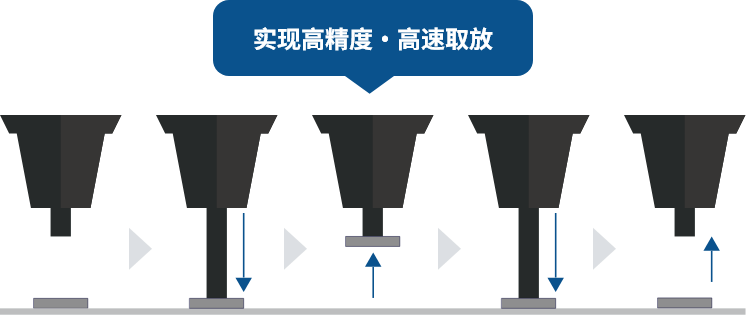
可在5mm行程内进行每秒5次的取放!
可通过确认波形调整节拍时间!
此外还能对此速度时的吸附状态进行判定!
【PPR】位置控制高速取放视频
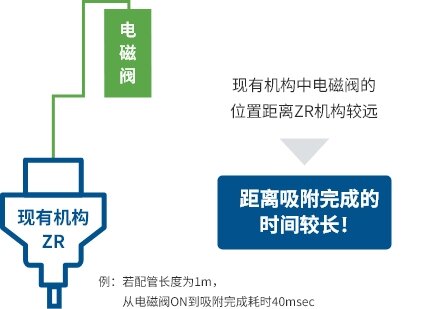
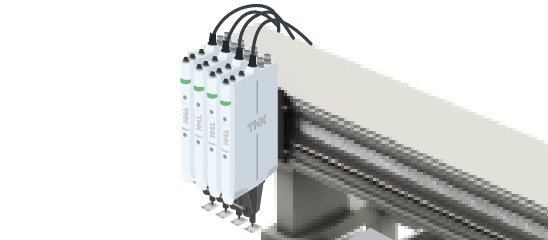
为何能实现高速取放
空压路径短可以实现快速工件吸附

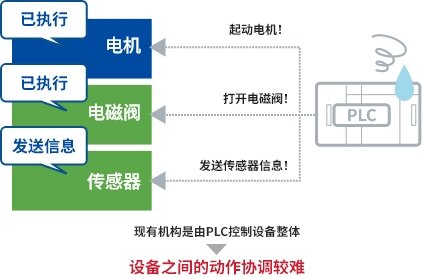
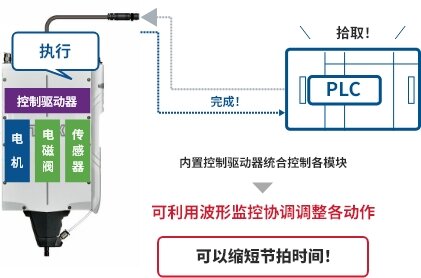
PPR内部统合控制
解决方案示例
困扰问题
在电子零部件的电气检查工序中为提高生产能力,希望能提升整体节拍!
采用的决定因素
内置空压设备的一体化集成,易于操作。使用3轴×4单元,通过叠装可以减少XY轴的移动次数。
困扰问题
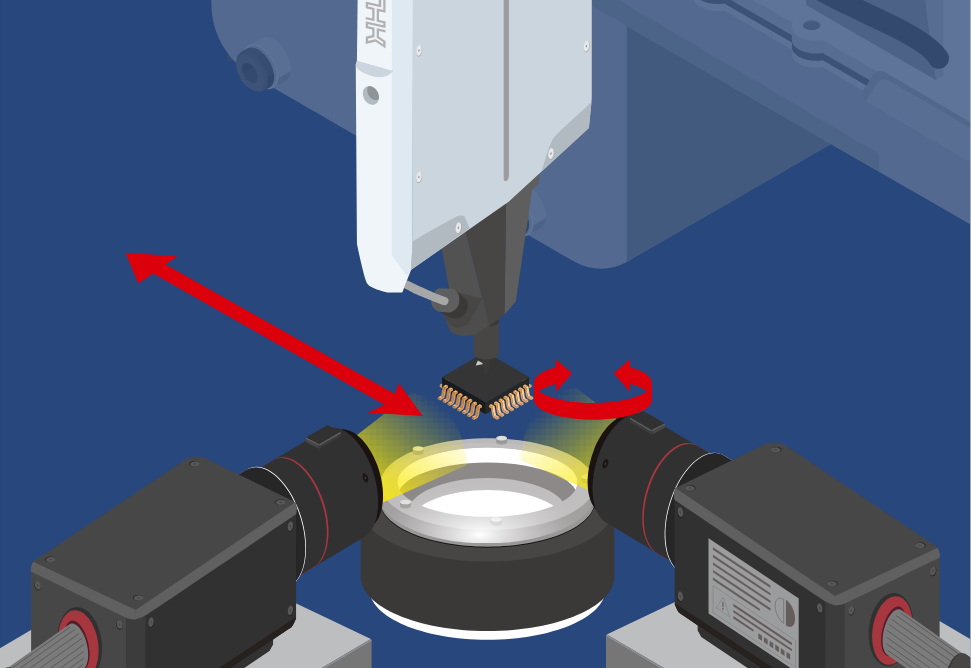
在电子元器件等的外观检查中,希望能直接对拾取的元件进行照相机检查!
采用的决定因素
相比无损伤,更需要提高现有设备XYZ轴的节拍。因为也有R轴,可以实现360度旋转检查。

困扰问题
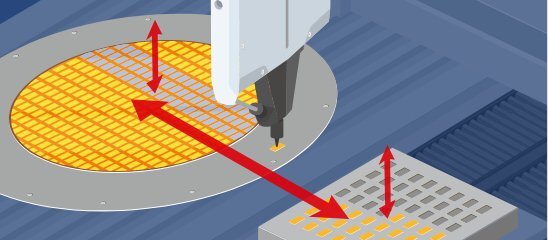
在生产线上,将切割后的芯片移载到托盘上。为加快节拍,希望增设流水线上所使用的设备数量!
采用的决定因素
通过R轴高精度旋转对应相机位置修正
节省空间能够短间距同时叠加8轴使用,因而采用PPR。
不太介意工件损伤,接触工件进行取放。
产品导入支持
专业的PPR技术团队,将从多方面验证导入PPR是否存在问题。
在您考虑购买产品时,我们将从您“想让这样的东西”“这样移载”等信息中,
听取所需要的讯息。敬请咨询。
技术计算
(节拍时间、可搬送质量)
可以根据搬送物的质量、惯性、动作模式进行事先计算,判断可否动作。
测试
(工件取放动作确认)
使用实际的工件和吸嘴等,验证是否可以执行预想动作。
样机借用
在您考虑购买时,我们可出借样机。请结合您想确认的内容联系我们。
样本程序
我们可以提供客户预想动作的样品程序。同时提供关于PLC连接的相关技术咨询。