
種類
特長タグをハイライトする
- モータ直結



特長
構造と特長
特長① 高性能を発揮する構造
モータ出力を開閉部に高効率で伝える駆動構造を採用しております。
多点位置決めや開閉速度制御、把持力設定が可能となり、繰り返し位置決め精度は±0.01mmを実現しました。

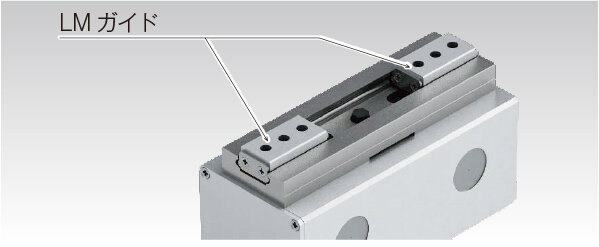
特長② 軽く動き、繰り返し開閉動作に強い構造
LMガイドの滑らかな動作に加え、高い剛性を実現します。
小リードスベリねじと減速機構を組合わせ、小さなモータの駆動力で高精度な位置決めと安定した把持力を実現します。
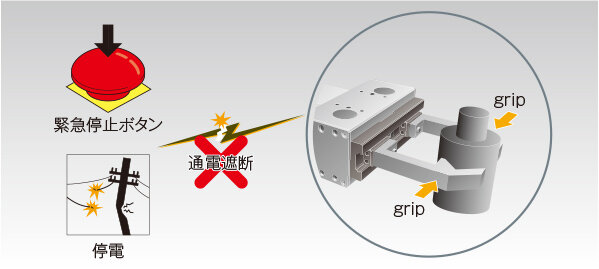
特長③ 電源遮断時でも把持力を維持
開閉部が位置を維持する機構のため、把持力を継続することができます。
※ 専用治具で開閉解除できます。
特長④ 購入バリエーションが選択可能
THK制御機器の組合わせモータ付き、貴社指定モータ付き、モータ無しのいずれかを選ぶことができます。


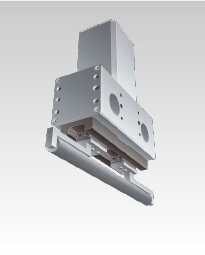
ステッピングモータ仕様

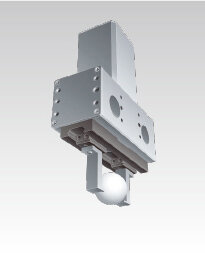
サーボモータ仕様
用途例
取付ける爪の形状によって、ワークを挟んだり、内側から把持したり、モーメントのかかる姿勢でも安定した把持が可能です。
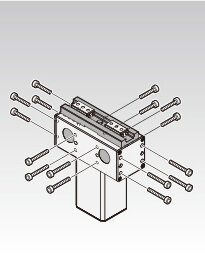
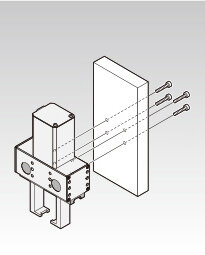
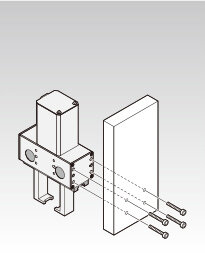
取付方法
本体の取付け箇所を4面とし、基準穴を有するため、脱着における位置の再現が容易です。
(反対面も取付け可)
(反対面も取付け可)
使用例
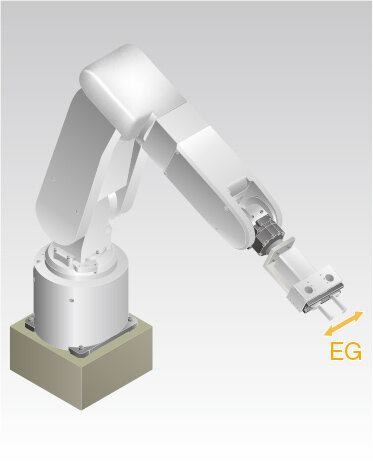
垂直多関節ロボット
搬送垂直多関節ロボットのハンド部にEGを使用しています。案内にLMガイドを使用しており、滑らかな動作に加え高い剛性を兼ね備えているため、モーメントのかかる姿勢でも安定した把持が可能となりました。
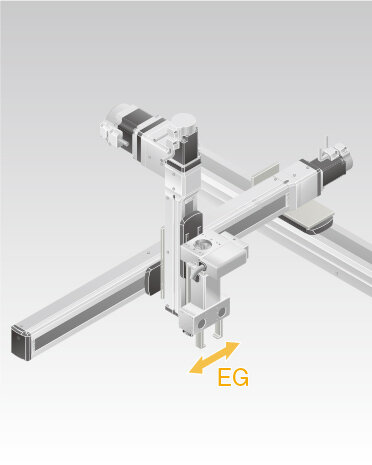
直交多軸ロボット
搬送直交多軸ロボットのエンドエフェクト(ハンド部)にEGを使用しています。取付ける爪の形状を変更することで、挟む・把持・内径把持などの動作が可能です。
シリーズ一覧(EG ステッピングドライバコントローラTSC仕様)
| 形番 | 送りねじリード [mm] |
ストローク※1 [mm] |
移動速度※1 [mm/s] |
加減速度 [G] |
モータサイズ | 把持力※2 [N] |
|---|---|---|---|---|---|---|
| EG28V | 2 | 14(7) | 80(40) | 0.1 | □28 | 20 |
| EG35V | 2 | 22(11) | 100(50) | 0.3 | □35 | 57 |
| EG42V | 2 | 30(15) | 140(70) | 0.3 | □42 | 102 |
-
※1
( )内は片側の値です。
-
※2
コントローラTSC選択時の値です。
形番ごとの詳細情報
図表の切り替え
- EG28V
- EG35V
- EG42V