特長
構造と特長
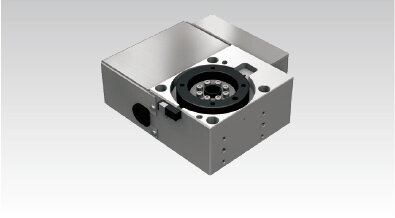
特長① 高性能を発揮する構造
モータ出力を回転テーブルに高効率で伝える駆動構造を採用しております。多点位置決めや一方向連続回転、回転速度制御、自由な設置角度が可能となり、繰り返し位置決め精度は±0.04度を実現しました。
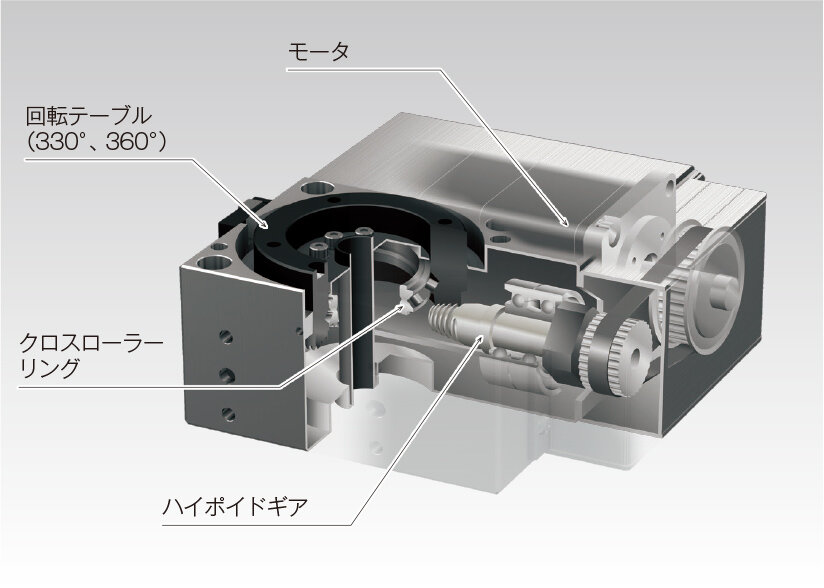
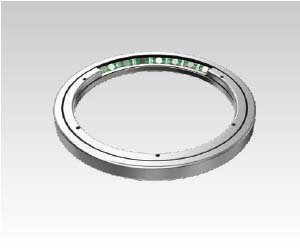
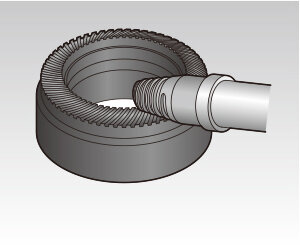
特長② 高精度の回転精度を実現する機構
当社製クロスローラーリングとハイポイドギアを組合わせた回転機構です。
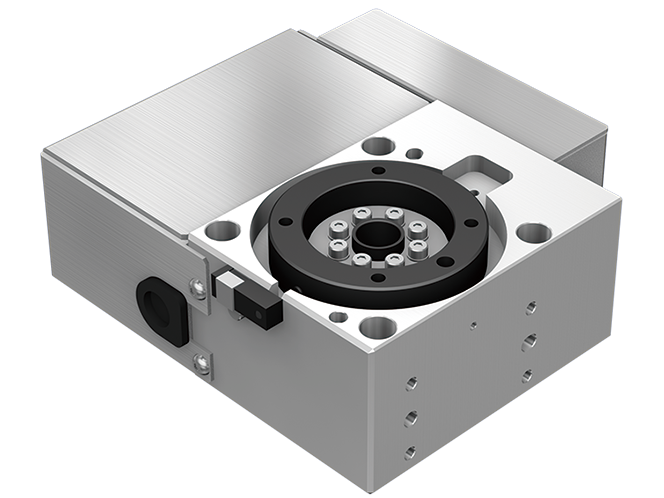
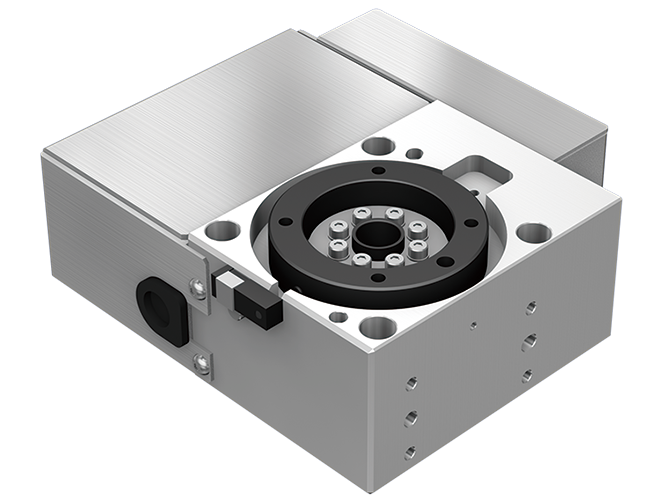
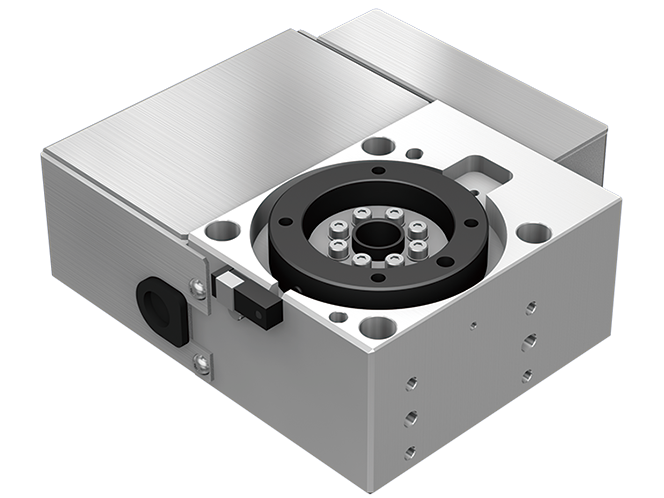
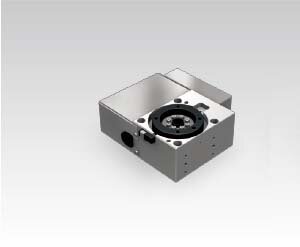
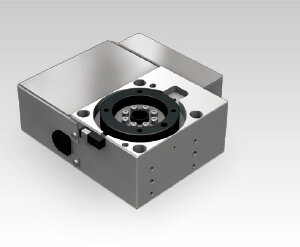
特長③ 薄型構造
回転テーブルとモータをコンパクトに収め、クロスローラーリングとハイポイドギアを一体化することで、製品高さを押さえた構造です。装置の省スペース化に貢献します。
特長④ 購入バリエーションが選択可能
THK制御機器の組合わせモータ付き、貴社指定モータ付き、モータ無しのいずれかを選ぶことができます。

ステッピングモータ仕様※

サーボモータ仕様※
-
※
各制御用途に合わせて330°(押当て原点方式)または、360°(センサ原点方式)がオプションで選択できます。
用途例
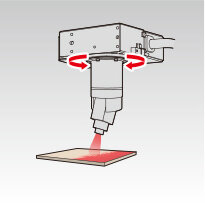
基本的な使い方(回転)


多様な使い方
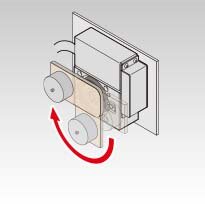
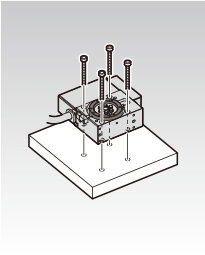
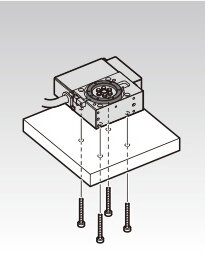
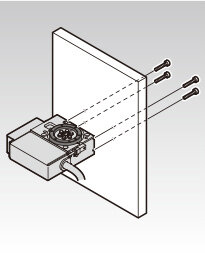
取付方法
どこにでも配置しやすいよう多面取付けに対応します。
-
注)
プーリ部を底面にして取付けることはできません。
詳しくは取扱説明書をご確認ください。
使用例
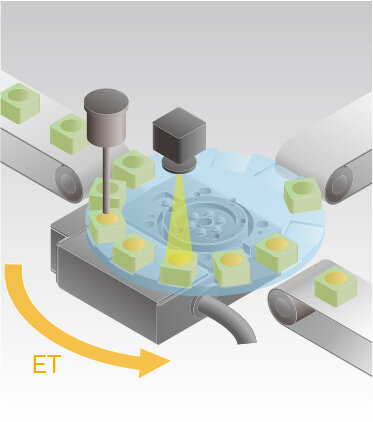
インデックステーブル
検査テーブルの回転部にETを使用しています。クロスローラーリングとハイポイドギアを組合わせた回転機構を採用したことにより高精度な割出しを実現しました。
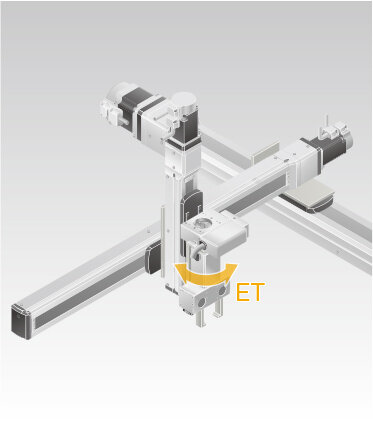
直交多軸ロボット
搬送直交多軸ロボットのハンド部回転機構にETを使用しています。薄型構造による軽量化で下軸への負荷を減らすことが可能です。
シリーズ一覧(ET ステッピングドライバコントローラTSC仕様)
| 形番 | 減速比 |
ストローク(片側) [度] |
最高角速度 [度/s] |
最大角加速度 [度/s2] |
モータサイズ | 最大出力トルク※3 [N・m] |
|---|---|---|---|---|---|---|
| ET20 | 1/45 | 330または360 | 270 | 2000 | □20 | 0.3 |
| ET35 | 1/20 | 330または360 | 600 | 3000 | □35 | 2.2 |
| 1/30 | 400 | 3.3 |
-
※3
角速度に応じて変わります。詳しくは各掲載ページの「角速度と出力トルク関係図」をご参照ください。
形番ごとの詳細情報
図表の切り替え
- ET20
- ET35