特長
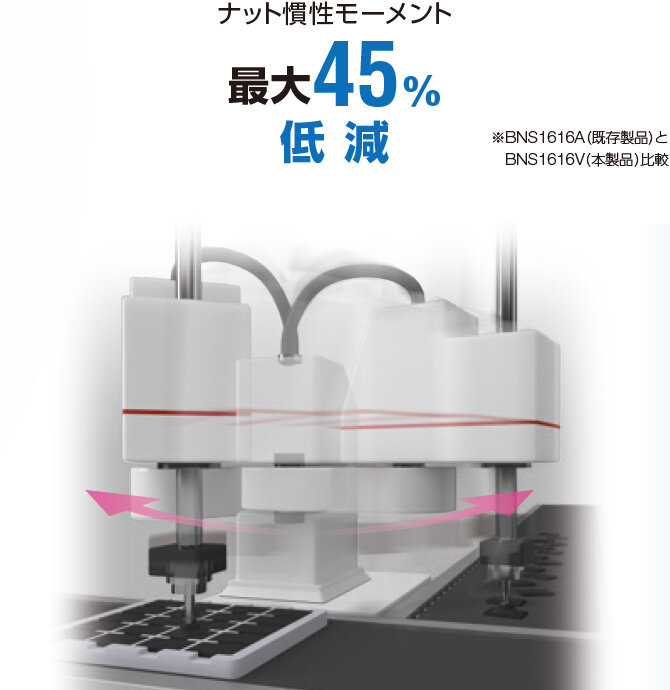
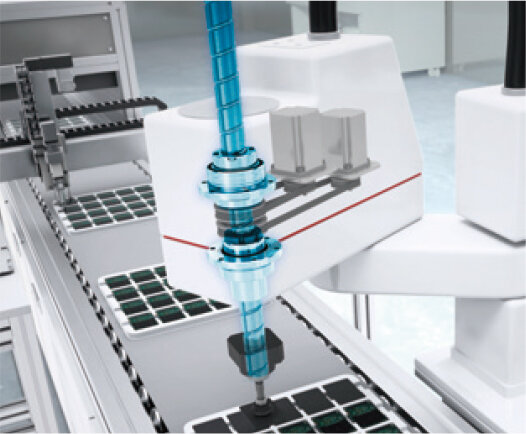
水平多関節ロボットの高タクト化
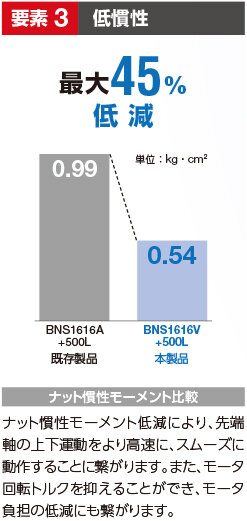
水平多関節ロボットの高タクトタイム化には、Z軸の低慣性化が求められています。
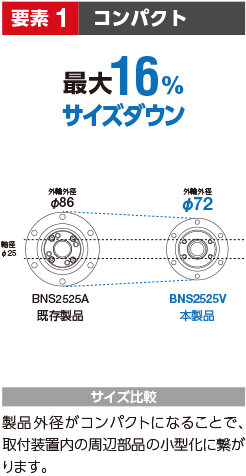
既存製品より、コンパクト・軽量化することにより、低慣性を実現し、設計の最適化が可能です。
装置のタクトタイム向上を実現する3つの要素
精密な動き・素早い動きを両立
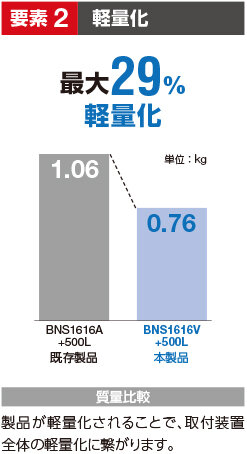
同じ軸径でありながらナット外径をコンパクトにし、軽量化を実現したため、タクトタイム短縮が可能です。
先端軸や周辺機器の小型化・軽量化によるモータ負荷低減により、発熱が軽減し、従来よりも長時間運転が可能になります。
形番ごとの詳細情報
図表の切り替え
- NS-V形