


Výzvy a pokroky v oblasti osazování polovodičových čipů metodou Pick-and-Place

Obrázek 1: Osazování a umisťování polovodičových čipů
Tento článek poskytuje přehled procesů a zařízení výroby polovodičových čipů, následovaný příklady každodenních produktů, které na těchto čipech spoléhají. Poté nastiňuje klíčové výzvy při výběru polovodičových čipů a představuje metody pro minimalizaci poškození. Na základě praktických případů použití je představena aplikace Pick-and-Place Robot (PPR) společnosti THK.
Doufáme, že tento článek bude praktickým užitkem jak pro mladé inženýry vstupující do polovodičového průmyslu, tak pro zkušené profesionály, kteří se již potýkají s výzvami procesu osazování a umisťování čipů.
Polovodiče jako základní technologie v tomto odvětví
Polovodiče jsou často popisovány jako „chléb s máslem“ v tomto odvětví. Jejich význam se odráží v široké škále aplikací. Centrální procesorové jednotky (CPU) jsou integrovány téměř do všech chytrých telefonů a počítačů, přičemž moderní systémy často používají více procesorů nebo vícejádrové architektury k efektivnímu zpracování dat. Ve složitých aplikacích, jako jsou vozidla, se také používá řada CPU, z nichž každý plní specifickou funkci.
Kromě procesorů jsou nezbytné paměťové komponenty, protože dočasně nebo trvale ukládají data během zpracování. Další klíčovou oblast použití představují senzory: obrazové, fotografické, akcelerační a tlakové senzory zachycují fyzikální veličiny a převádějí je na digitální informace používané v mnoha spotřebních a průmyslových produktech.
Polovodiče také významně ovlivnily osvětlovací technologii. Díky své účinnosti, dlouhé životnosti a kompaktnímu designu LED diody z velké části nahradily konvenční světelné zdroje a nyní se široce používají ve vozidlech, infrastruktuře a displejích.
Celkově tyto příklady ilustrují ústřední roli, kterou polovodiče hrají v každodenním životě.
Obrázek 2: Aplikace polovodičů
Polovodičové čipy a jejich výroba
Polovodiče se zpočátku vyrábějí z materiálu na bázi křemíku1. Monokrystalické křemíkové bloky, známé jako ingoty, se krájejí na tenké destičky. Tyto destičky poté procházejí předzpracováním, jako je vytváření vzorů a singulace čipů, při kterých se destička rozdělí na jednotlivé funkční mikročipy. Tyto mikročipy se označují jako polovodičové čipy nebo matrice. Termín čip odráží skutečnost, že se jedná o malé kousky nebo fragmenty většího křemíkového ingotu, zatímco matrice označuje čtvercový nebo krychlový kus materiálu, podobný tvaru herní matrice – odtud termín singulace čipů.
V této fázi jsou čipy odděleny, ale zatím je nelze přímo použít v obvodu2. Nejprve musí být namontovány na rám s polarizovanými vývody nebo na polovodičové pouzdro, které je propojeno s obvodem. Tento krok se nazývá spojování čipů, během kterého se čip připevňuje pájením nebo lepením.
V následném procesu spojování vodičů je čip elektricky připojen k rámu nebo pouzdru pomocí tenkých kovových drátků. V tomto bodě jsou jak dráty, tak povrch polovodičového čipu odkryté a vyžadují opatrné zacházení. Pro zajištění mechanické ochrany a stability se v dalším kroku – tzv. lití – nanáší pryskyřice, která vytváří ochranné zapouzdření.
(1) Používají se i jiné materiály.
(2) V době psaní tohoto článku existovala také technika známá jako flip-chip bonding.
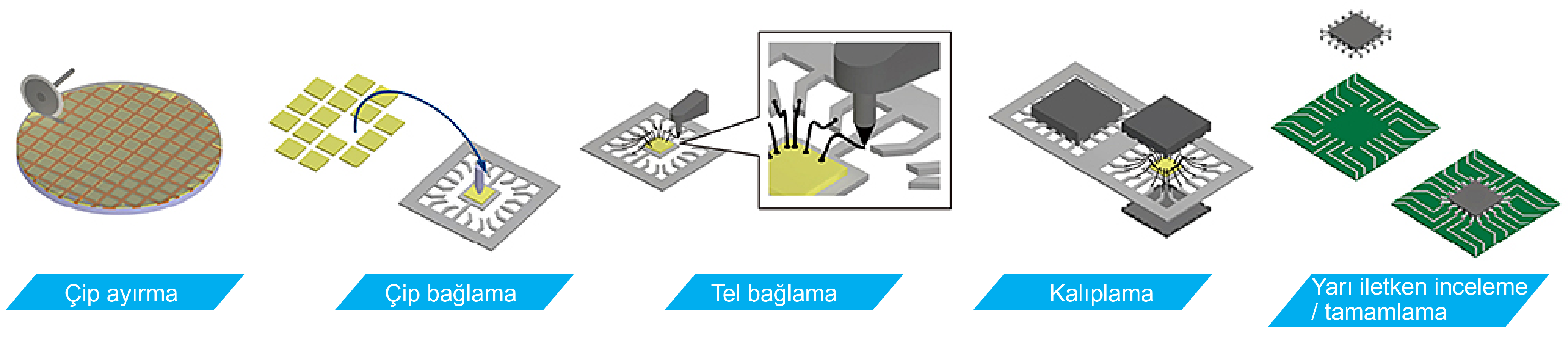
Obrázek 3: Proces výroby polovodičů
Mezi různé stroje používané v těchto krocích zpracování patří řezačky na kostky pro jednotku raznic, spojovače raznic pro umisťování raznic (mikročipů), třídičky3 pro předběžné třídění raznic před jejich spojováním a spojovače drátů pro spojování drátů.
(3) Třídiče dokáží odstranit třísky, které jsou během testování identifikovány jako vadné.
Problémy s manipulací s polovodičovými čipy
Vraťme se k procesům, při kterých se destičky oddělují na jednotlivé čipy a tyto čipy se následně sbírají. Během oddělování matrice se destičky upevní na lepicí pásku, aby se zabránilo jejich rozptylu během řezání. Po procesu řezání se čipy oddělené od destičky uchopí sběrným nástrojem a sejmou se z lepicí pásky.
Vzhledem k fyzikálním vlastnostem křemíku se materiál může zlomit nebo se v něm mohou vyvinout trhliny i při menších nárazech. To vytváří riziko poškození čipů, které již úspěšně prošly předchozími kroky zpracování. Aby se toto riziko snížilo, lepicí páska připevněná k destičce se natahuje (roztažení pásky) a vyhazovací kolíky čipy mírně zvedají zespodu jeden po druhém. To umožňuje vyjímacím nástrojům snadněji a jemněji oddělit čipy od lepicí pásky.
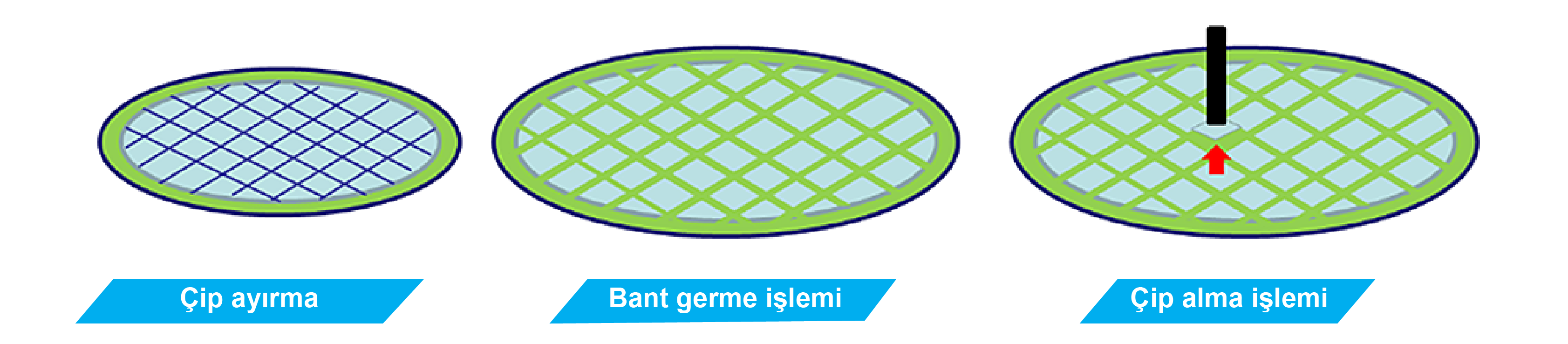
Obrázek 4: Roztahování pásky a zvedání polovodičových čipů pomocí úchopového nástroje
Zvedání třísek pomocí vyhazovacích kolíků usnadňuje odstranění lepicí pásky, vyžaduje však vysoce přesné a technologicky náročné provedení. Tento proces komplikují následující faktory:
1. Třísky mají velmi malou tloušťku a jsou velmi citlivé na mechanické namáhání.
2. Vyhazovací kolíky a sběrné nástroje musí být přesně synchronizovány v čase a prostoru.
3. Opotřebení může způsobit nesouosost vyhazovacích kolíků a kleštin vzhledem k třískám.
4. V polovodičovém a elektronickém průmyslu se sací tryska označuje jako kleština.
V následující části jsou jednotlivé komplikující faktory podrobněji zkoumány.
1. Tenké a extrémně citlivé čipy
Jak již bylo zmíněno výše, ingoty se pro výrobu polovodičových destiček řežou na tenké plátky. Čím tenčí tyto destičky jsou, tím více destiček lze z jednoho ingotu získat, což snižuje náklady na destičku. Menší a tenčí polovodičové součástky navíc vyžadují při montáži na desku plošných spojů menší plochu a objem. To vše přispívá ke kompaktnějšímu provedení hotového elektronického zařízení a uživatelsky přívětivějšímu konečnému produktu.
Zatímco mnoho čipů se z důvodu mechanické pevnosti a snadnější manipulace ztenčuje na tloušťku 0,5 mm až 1,0 mm, některé nejmodernější čipy mohou mít tloušťku pouze asi 20 µm.
2. Synchronizovaný pohyb vyhazovacího kolíku a nástroje pro uchopení
Vyhazovací kolík se pohybuje směrem nahoru ze spodní strany polovodičového čipu pomocí servomotoru nebo jiného hnacího mechanismu. Kleština na uchopovací jednotce je rovněž poháněna servomotorem nebo jiným aktuátorem, ale pohybuje se směrem dolů. Postup pro uchopení polovodičového čipu je následující:
1. Kleština se za současného podtlaku spustí dolů k třísce.
2. Vyhazovací kolík se zvedne.
3. Vyhazovací kolík a kleština se zvednou současně.
4. Kleština se dále pohybuje nahoru a nabírá třísku.
Během tohoto procesu je čip vystaven jak namáhání způsobenému kontaktem s kleštinou a vyhazovacím kolíkem, tak i silám vyplývajícím z upínání mezi nimi. Pro snížení poškození těchto tenkých polovodičových čipů je nutné vysoce přesné řízení polohy, řízení rychlosti a synchronizovaný pohyb podél svislé osy.
Podle našich výzkumů má i upnutí o velikosti pouhých několika desítek mikrometrů za následek zatížení v řádu stovek gramů, což činí přísnou kontrolu polohy nezbytnou.
3. Opotřebení může změnit relativní polohu vyhazovacího kolíku a kleštiny vzhledem k třísce.
Vyhazovací kolíky a kleštiny přicházejí do kontaktu s třískami tisíce, ne-li desetitisícekrát denně, což způsobuje jejich postupné opotřebení. Pro zamezení tomuto opotřebení se pro tyto součásti používají tvrdé kovy a dokonce i diamanty. Hroty těchto součástí se však mohou deformovat a změnit jejich relativní polohu vzhledem k třískám. To může vést jak k chybám při vyhazování, tak k poškození manipulovaných třísek.
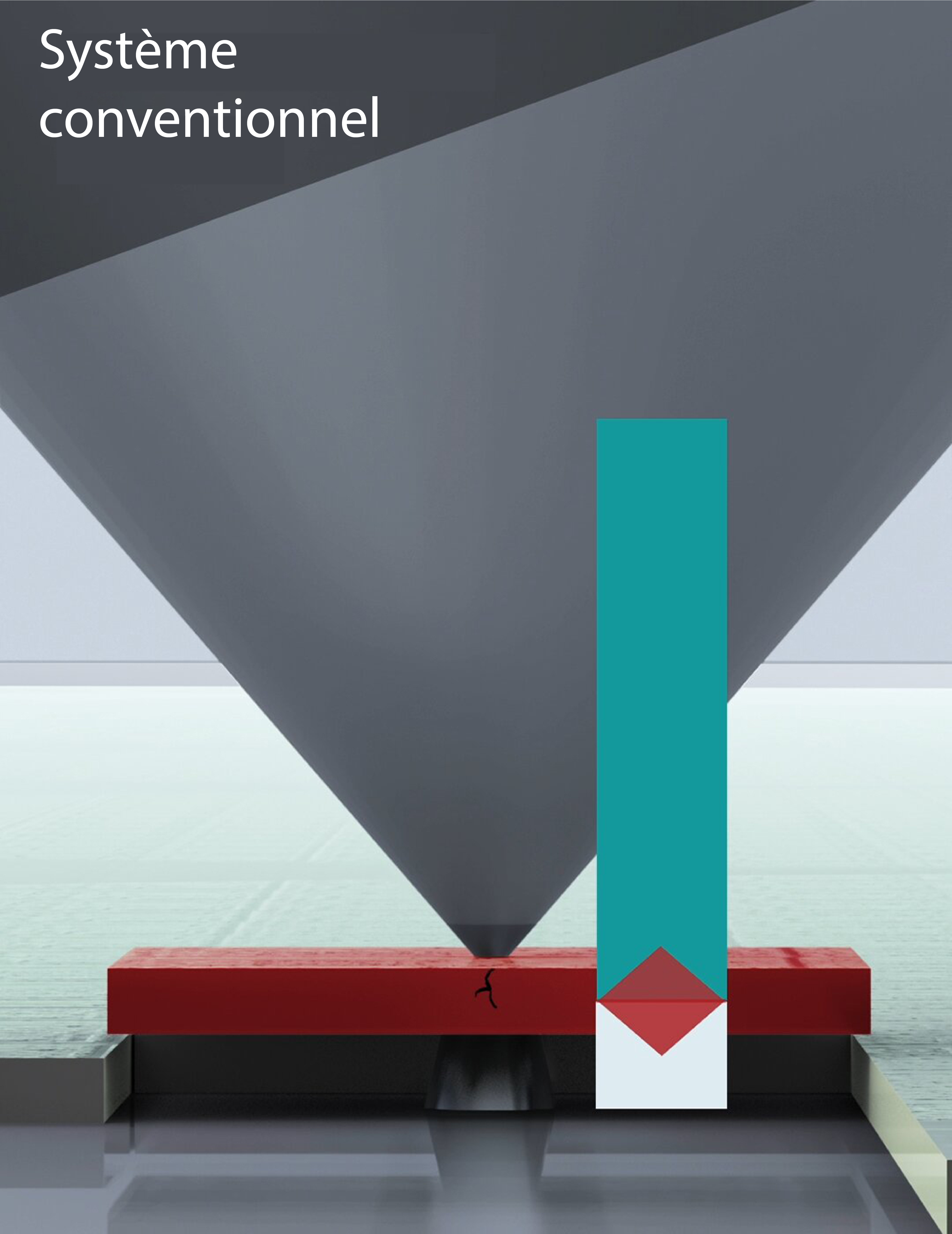
Obrázek 5: Rázové zatížení způsobené zaseknutím v důsledku nedostatečné možnosti nastavení během zvedání pomocí vyhazovacího čepu
Výhody robota Pick and Place PPR
Jako integrovaný systém je PPR vybaven lineárním motorem a enkodérem pro osu Z a také snímačem síly, díky čemuž je ideální pro širokou škálu procesů snímání polovodičových čipů.
Díky funkci zastavení kontaktu, která se aktivuje, jakmile se kleština dotkne polovodičového čipu, PPR snižuje rázové zatížení čipu. Stejná funkce může také zabránit kolísání intenzity tohoto rázového zatížení, ke kterému může docházet například v důsledku posunů kleštiny způsobených opotřebením. Protože PPR dokáže zachytit informace o poloze až do mikrometrového rozsahu, je navíc schopen detekovat takové opotřebení kleštiny kontrolou polohy kleštiny v okamžiku, kdy se dotkne čipu.
Případovou studii navrhovaného řešení, ve kterém se určování výšky provádí pomocí informací o poloze, naleznete na této stránce.
Pomocí funkce řízení přítlačné síly PPR, která je synchronizována s vyhazovacími kolíky, lze udržovat konstantní předem definované zatížení odebíraných třísek. To umožňuje zabránit rázovému zatížení během zvedání třísek, které by překročilo nastavené zatížení, a to i v případě, že pohyb podél svislé osy není synchronizován s vysokou přesností.
Případovou studii navrhovaného řešení, která demonstruje chování senzorů síly používaných pro řízení lisovací síly, naleznete na této stránce.

Obrázek 6: Tlumení nárazů zamezením superponovaných sil během zvedání třísek
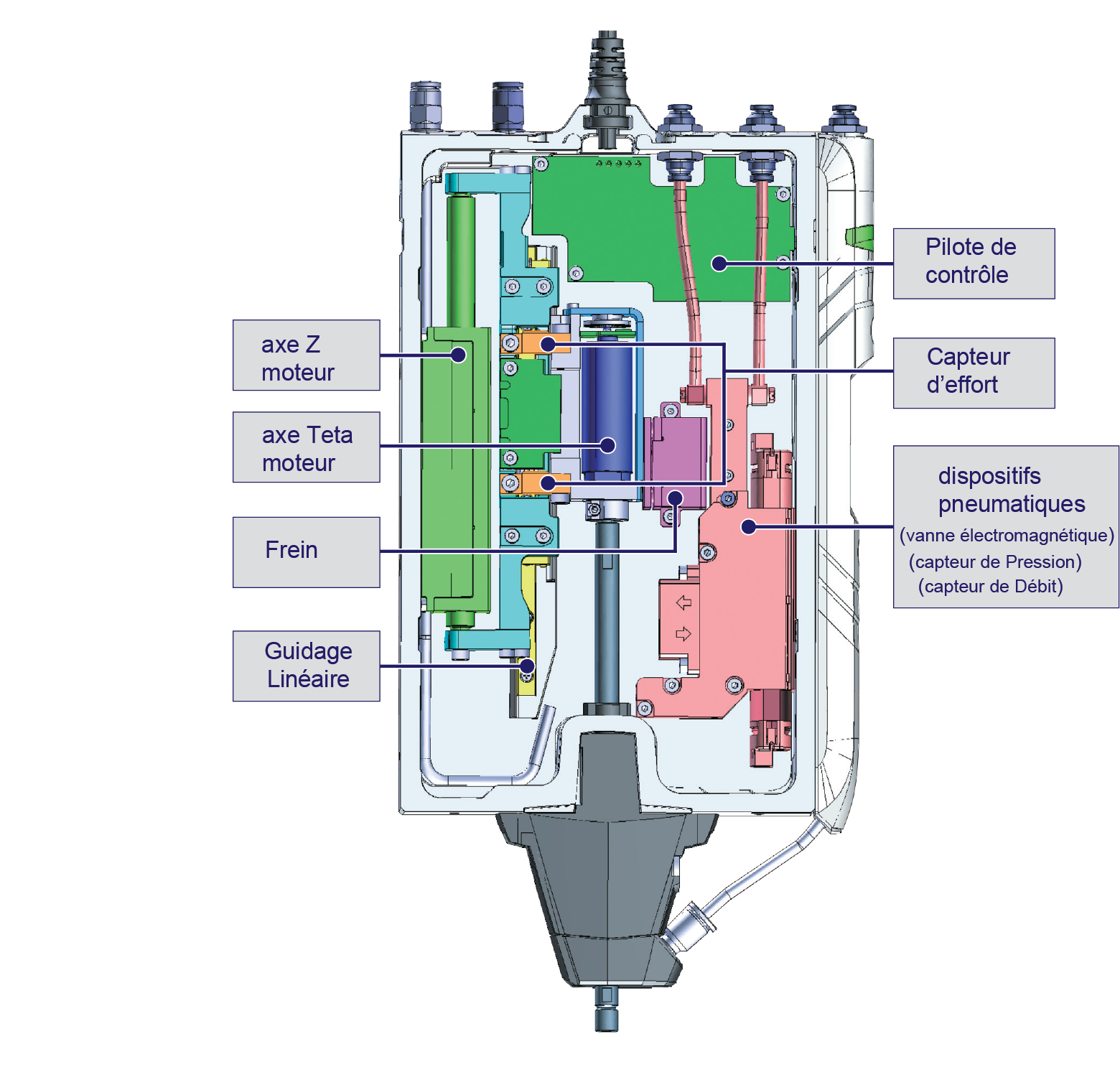
Obrázek 7: Struktura robota pro uchopení a umístění PPR
Podpora vyšších výnosů ve výrobě polovodičů
Tentokrát se pozornost zaměřila na to, jak jsou polovodičové čipy uchopovány během zpracování. Zkoumány byly jak výzvy související s prevencí poškození, tak i vylepšení procesů, které umožňuje Pick and Place Robot PPR. Jak je popsáno v první části tohoto článku, polovodiče jsou klíčovou součástí moderních technologií. Vzhledem k tomu, že funkční požadavky na zařízení, jako jsou chytré telefony, neustále rostou, existuje odpovídající potřeba vyrábět polovodiče stále menší a tenčí. Zpětná vazba od uživatelů však naznačuje, že mnoho výrobců zařízení a strojů čelí v tomto ohledu značným výzvám.
Předpokládá se, že PPR spolu s dalšími technologiemi THK může pomoci řešit tyto výzvy a podpořit další rozvoj procesů v polovodičovém průmyslu.
Pro další informace nebo technickou podporu kontaktujte prosím společnost THK.
THK GmbH
PR Group
Kaiserswerther Strasse 115,
40880 Ratingen, Germany
Tel: +49 2102 7425 555
E-mail: press@thk.eu
www.thk.com
