


- ピック&プレース
- システム

はじめに
お客様とのお話を聞くと、アクチュエータの選定などをされる時、「こういった動作を」「これくらいの時間以内にできるか」という目標のタクトタイムを設定されていることがほとんどです。PPRでも、ワークのピック&プレースにどれくらいの時間がかかるのか知りたい。というお声は数多く頂きます。
もし、具体的な動作のパターンやワークの条件などがあるようでしたら、弊社の営業やお問い合わせフォームからご連絡頂ければ、机上計算での動作可否や実現可能なタクトタイムを計算して差し上げることが可能です。
こちらはぜひご連絡頂ければと思います。
ここでは、PPRではどれくらいの動作が出来るのか、の目安として計算したシートがありますので、これをご紹介したいと思います。
位置制御による往復動作時間
まずは、単純な往復動作での動作時間を計算しました。
搬送物の質量が重くなると、モータには負荷がかかります。「物を早く動かす」かつ「物を搬送し続ける」ためには、モータが破損しない範囲で動作設定して使用する必要があります。
こちらの表は、「ある搬送質量」を「一定のストローク」往復する時の動作時間を、Z軸のリニアモータの推力から動作可能な最速の速度・加速度で実行した時の概算になります。
例えばPPRを位置制御のみで動作させた場合、ピック動作時の動作時間はこちらの往復時間+吸着時間になります。
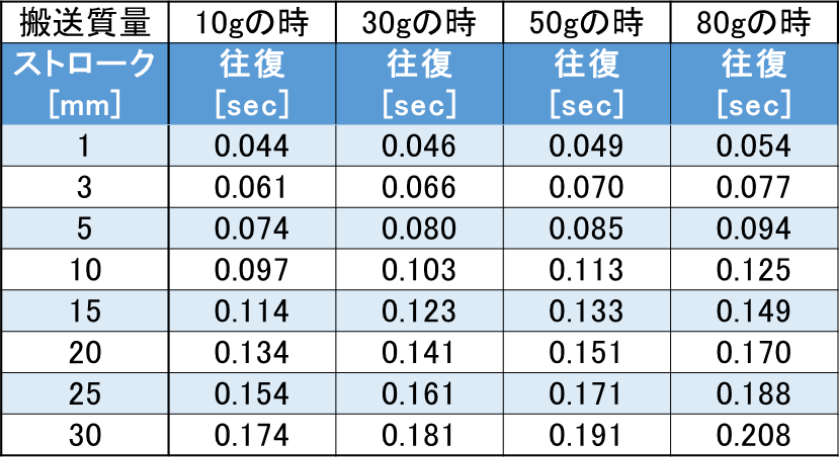
[PPR-LR3でのZ軸往復時間目安]
「接触停止」を使用した場合の動作時間
続いて、接触停止動作について計算します。
「接触停止」機能を使用した場合、PPRは力センサで設定したしきい値を検出した時点でZ軸を停止させることが出来ます。この機能によりワークへの衝撃を抑えることが出来ます。ただし、ワークへの衝撃はこの「接触停止」時の速度より変化します。(実際には、ノズルやベース、ワーク自体の材質やノズル形状等も影響すると考えられます)
ここでは、PPRの「接触停止」を使用する際の推奨速度である10mm/s以下の速度にした場合に、各ストロークでどのような時間になるかを記載しました。
例えば「接触停止」を使用してピック動作をさせた場合は、前項の位置制御による動作時間+接触停止による動作時間+吸着時間になります。
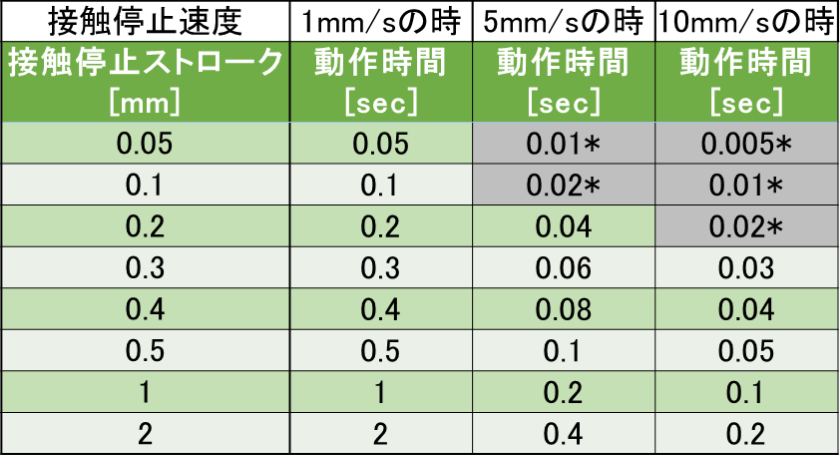
[PPR-LR3での接触停止動作時間目安]
- 接触停止動作は、20~30ms分のストロークを確保する必要があります。
実機による検証
さてこれを踏まえて、実際にどの程度の動作が可能であるか実験した動画がありますので合わせてご紹介します。
5mmストローク位置制御での高速P&P事例です。
さて、今回はPPRで実現可能なタクトタイムについて、記載しました。
実際の動作では、「接触停止が必要か」「衝撃力はどの程度の抑えたいか」「"何か"に接触するストロークはどの範囲か」等により、最適なプログラムが変化します。ご相談頂けましたら、実現されたい動作に合わせてパターンを検討し、サンプルのプログラムを作成することも可能です。
ご採用に向けてのヒントとなりましたら幸いです。