


- ワーク
- 課題解決

はじめに
こちらの記事では、お客様から頂いたお問い合わせについて、「PPRではどのように解決できるか」というテーマでご紹介していきます。
今回のお問い合わせはこちらです。
「ワークを下から突き上げる工程があるが、シャフトを突き上げピンと同期させることは出来るか?」
チップの突上げとは?
こちらのお問い合わせは、半導体業界の方から多数頂きます。
半導体の製造工程には、前工程・後工程がありますが、後工程にダイシング(ウエハをカットしてチップ化する)して、チップを取り出す。という工程があります。
この工程をもう少し詳しくご説明します。
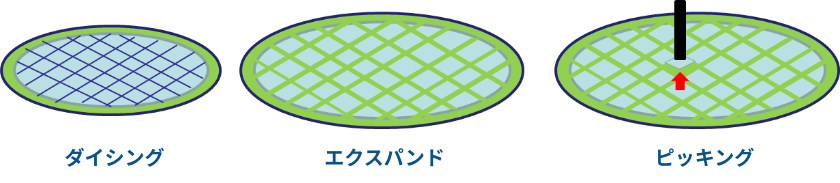
① ダイシングする時には、粘着テープにウエハをくっつけます。
② ダイシングします。
③ ダイシング後の粘着テープを引き延ばし、チップ同士の間隔を開けます。
④ 取り出したいチップを突き上げピンで突き上げ、テープから取り出しやすい状態にします。
⑤ ピックアップツール(PPRのような)を使用し、吸着して引き剥がします。
ここで、チップのピックアップを安定的に行うため、④と⑤の手順を同時に行い、吸着ノズルがワークに当たっている状態で、下から突き上げを行い、取りやすくしてからピックアップする。というのがやりたい動作になります。
ここで問題となるのが、突き上げ時に突き上げピンとノズルがワークを挟むことになるため、デリケートなワークに衝撃が加わり、破損してしまう可能性があることです。
さて、PPRではどう解決できるでしょうか。
PPRの機能を利用した解決案
回答はこちらになります。
「PPRは力センサを内蔵しており、力センサのフィードバック制御を行った"押付力制御"が可能です。押付力制御ではワークに対して一定の荷重を保つことが出来ます。例えば突き上げピンで突き上げられた時でも、PPRは自動的にシャフトを上昇させ、挟み込みで発生する力を逃がすことが出来ます。」
しかも、PPRでは位置と力センサの値をモニタリング出来ますので、実際に突き上げられた距離や、突き上げ中の力の変化も確認することが出来ます。
実際にどのような挙動になるか、簡易的に実験してみると、このような波形データが取れました。

こちらは、押付力制御で0.5Nを保持した状態で、シャフトを手で上下させた時の「Z軸現在位置」と「力センサ」の波形です。位置変化に対して押付力にほとんど変化が無いことが分かります。
また、実際に実験した様子について、動画がありますので合わせてご紹介します。

「突き上げ動作との同期」を実現する具体的なシーケンス例
PPRのシーケンスの組み方としては、どのようにすれば良いでしょうか。
突き上げピンで上昇する時には、「押付力制御」状態である必要があります。
そこで、一つの例としては以下の内容をご提案できます。
1.シーケンス①:ワークに接触し、「押付力制御」状態にする。吸着弁を開け、吸着判定まで実施する。
※シーケンス終了時点で「押付力制御」状態であれば、次の指示までその状態を維持します。
2.突き上げピンによる突き上げ
3.シーケンス②:上昇する
詳しいシーケンスの設定や動作に関するアイデアについては、ご相談頂ければサンプルシーケンスを作成する等の対応も可能です。
こちらの記事をご覧になった皆さんの、工程改善の一助となることが出来れば幸いです。