

- 取放
- 系统

前言
我们在接受客户咨询时发现大多数的客户在选定引动器时,会确认在预先设想动作条件下的节拍时间,是否可以满足客户的目标节拍时间等内容的咨询。
如有具体的动作模式和工件条件等信息,请联系我公司办事处或邮件咨询,我们可提供动作可行性评估和节拍时间计算等技术对应。
请务必联系我公司。
在这里想为大家介绍一下PPR节拍时间概算表格的使用方法。
位置控制时的往复动作时间
首先进行了单纯往复动作时间的计算。
搬送物的质量增加时,负载会施加到电机上。为了"快速移动物品"和"持续搬运物品",必须在不损伤电机的范围内设定动作并使用。
此表格为Z轴直线电机推力以最快速度和加速度将"某搬运质量"在"一定行程"条件下往复取放时的动作概算时间。
例如,仅通过位置控制进行PPR动作时,拾取动作时的动作时间为以下表格的往复时间+吸附时间。
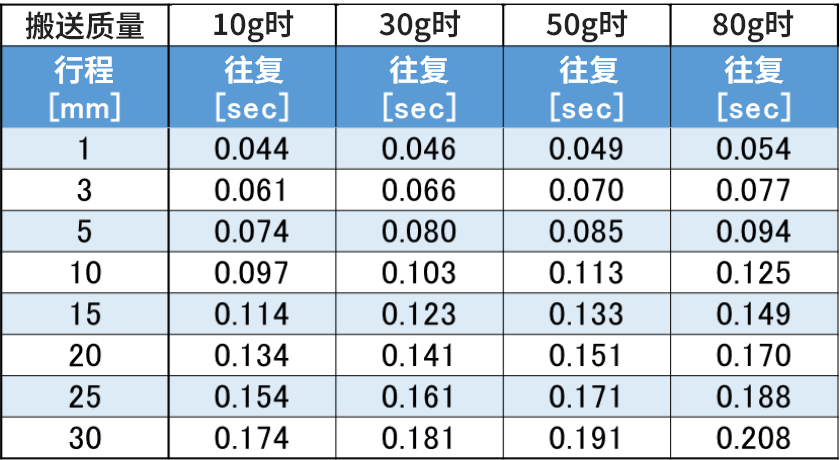
[PPR-LR3(主机)Z轴往复时间的概算参考数值]
使用"接触停止"时的动作时间
以下计算接触停止动作时的时间。
使用"接触停止"功能时,PPR通过力传感器检测到设定的阈值时可以停止Z轴的动作。该功能可减轻对工件的冲击。然而,对工件的冲击根据该"接触停止"时的速度而变化。
此处记载了把速度设为PPR"接触停止"推荐使用速度10mm/s以下时各行程所用的时间。
例如使用"接触停止"进行拾取动作时,所用时间为前项位置控制的动作时间+接触停止的动作时间+吸附时间。
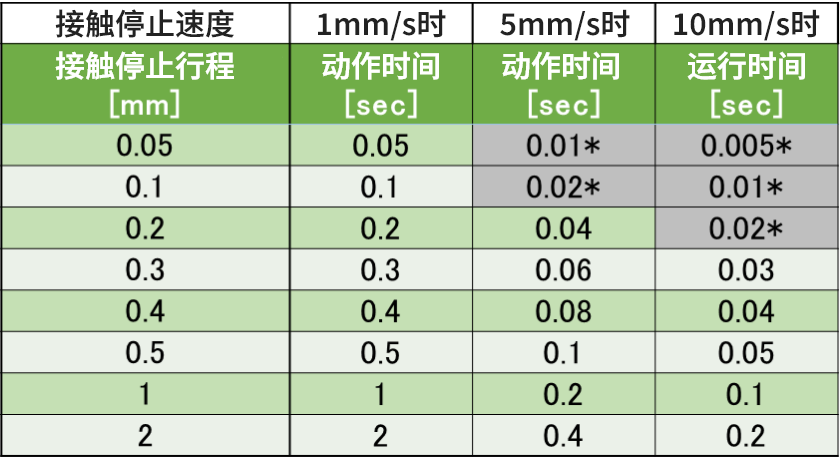
[PPR-LR3(主机)接触停止动作时间的概算参考数值]
- 接触停止动作必须确保20-30ms时间的行程量。
实机验证
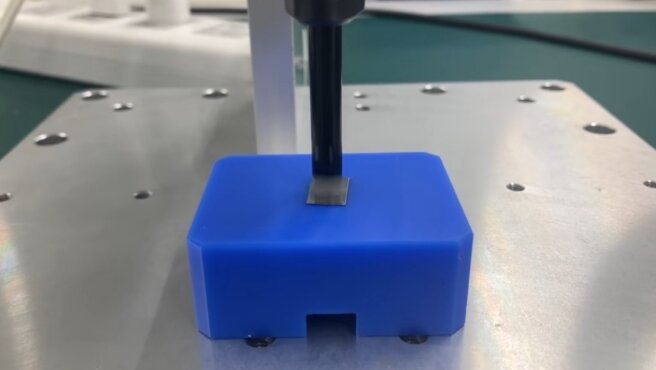
我们有根据以上条件设定的动作节拍时间验证视频,请您参考。
5mm行程位置控制时的高速取放验证视频。
以上记载了通过PPR可以实现的节拍时间说明。
在实际动作中,根据"是否需要接触停止"、"要把冲击力减轻到什么程度"、"接触'某物'的行程需要多少"等条件,最适合的程序会发生变化。通过技术咨询,我们可以根据您所需的动作模式制作和提供样本程序。
希望能为您的实际应用提供帮助。