





All in One P&P System
多くの機器の取り付けにより装置が大型になり
タクトタイムが維持できなくなる

薄くて軽量なオールインワン構造
簡単設置・省配線で高速P&Pを実現します

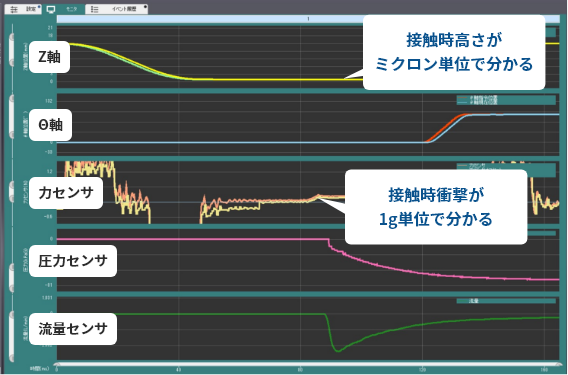
位置と力を“制御”+“可視化”



微細・微小なワークをダメージから守る
ピック&プレースロボットPick and Place Robot
THK独自の力センシング技術により、ノズルとワークの接触を高精度に検出します。
ワークをダメージから守りながら、サイクルタイムの短縮にも貢献する 「ピック&プレースに最適化されたロボット」です。
| 機能 | PPR2-LR04 (小型ヘッドモデル) |
PPR-LR3 (空圧ユニット一体モデル) |
PPR-LR3-LF1 (位置制御専用モデル) |
|---|---|---|---|
| 高速P&P | |||
| 高精度 位置決め |
|||
| 接触停止 | |||
| 押付力制御 | |||
| 波形モニタ | ※ | ||
| 省スペース |
※力センサの波形モニタは出来ません
導入サポート
PPRの使い方をマスターしたサポートスタッフが、導入に問題が無いか多方面から検証します。
製品購入のご検討に当たり、「こんなものを」「こんな風に動かしたい」といった情報から、
必要な内容をヒアリングさせていただきます。お気軽にご相談ください。
技術計算
(タクト・可搬)
搬送物の質量やイナーシャ、動作パターンに基づいて動作可否の事前計算が可能です。
実験
(ワークP&P お試し)
実際のワークやノズル等を使用して、イメージする動作が可能かどうか実験致します。
デモ機貸出
購入のご検討に当たり、デモ機のお貸出しに対応致します。ご確認されたい内容と合わせてご連絡ください。
サンプル
プログラム
実際の使用イメージに合わせたサンプルの動作プログラムをご提供出来ます。PLCとの接続についてもご相談ください。



技術情報



FAQ
積層設置できますか?
積層設置可能です。
取付ピッチは16㎜です。
※詳細は取扱説明書4-2-4ヘッドの設置方法をご参照ください。
本体取付のネジ穴は側面のみですか?
取付用のねじ穴は、両側面と下面にあります。
側面:M4深さ4ねじ穴×2、φ4H7深さ4ピン穴×1、4H7深さ4長穴
下穴:M3深さ3ねじ穴×2
※内部部品破損防止のため、取り付けネジ長さにご注意ください。
※取扱説明書4-2-4 ヘッドの設置方法をご参照ください。
タイムアウトが発生した。原因調査したい。
モニタ画面、イベント履歴画面で波形を確認してください。
タイムアウト発生時に最後に動作しているモジュールはどのモジュールでしょうか?
そのステップが動作してタイムアウトが発生した場合、その次のステップで止まっている可能性が高いです。
波形データを送って頂けましたら、弊社でも調査にご協力できます。