


Roboty przemysłowe
W wielu gałęziach przemysłu są stosowane roboty do bardzo szybkiego i precyzyjnego pozycjonowania części. Niektóre roboty, których ruchy nie są ograniczone tylko do wzajemnie prostopadłych mają wieloprzegubowe zespoły, które pozwalają im symulować ruchy ludzkiej ręki. Te zespoły muszą mieć dużą precyzję ruchów wahliwych i sztywność zapewniającą, że nagłe zatrzymanie nie zakłóci ścieżki ich ruchu. Unikatowe produkty firmy THK są mocne i wystarczająco małe, aby spełnić te wymagania
Roboty 5–przegubowe
Pozycjonowanie robota jest wyzwaniem ze względu na występujące przyspieszenia dodatnie i ujemne. Zespół prowadnicy musi być precyzyjny i sztywny, a podstawowa jego struktura musi się charakteryzować doskonałym tłumieniem podczas zatrzymywania. Aby osiągnąć taką sztywność i prędkość, w zespołach wahliwych są stosowane łożyska krzyżowo–rolkowe.
Roboty spawające łukiem elektrycznym
W zespołach obrotowych przegubów robotów spawających łukiem elektrycznym na liniach produkcyjnych fabryk stosowane są łożyska krzyżowo–rolkowe. Ponieważ łożyska krzyżowo–rolkowe są same w sobie dostatecznie sztywne w kierunku każdego obciążenia momentem poprzecznym i osiowym, mogą być one stosowane do projektowania kompaktowych połączeń przegubowych robotów.
Roboty skalarne
Roboty skalarne są stosowane do transportu i pozycjonowania części w zakresie małych obszarów. Systemy prowadnic liniowych są podstawą ich wysokiej precyzji zarówno w ruchu posuwistym, jak i obrotowym w osi Z, gdzie istotna jest duża szybkość i małe bicie.
Roboty z podwójnym ramieniem
Roboty z podwójnym ramieniem, symulujące ruchy ludzkich rąk, muszą być zdolne do płynnego, wielokrotnego powtarzania skomplikowanych ruchów. Ponadto muszą one być sztywne i charakteryzować się szybką reakcją. Systemy liniowe i łożyska krzyżowo–rolkowe firmy THK pozwalają zmniejszyć wielkość robotów przy zachowaniu większej ich sztywności i szybkości.
Wykorzystywane produkty

Prowadnice liniowe
Prowadnica liniowa jest naszym głównym produktem, w którym po raz pierwszy praktyczne użycie znalazło połączenie części z liniowo–obrotowym ruchem.
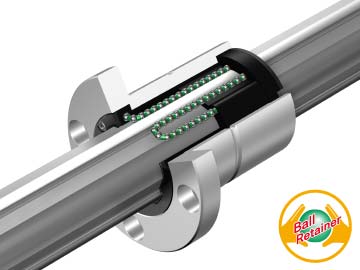
Tuleje toczne przenoszące moment skrętny z wałkiem profilowanym
Wielowypustowy napęd kulkowy to prowadnica wałkowa z łożyskiem.

Łożyska krzyżowo-rolkowe
Łożysko krzyżowo–rolkowe jest łożyskiem wałeczkowym charakteryzującym się dużą dokładnością obrotu i możliwością obciążania w każdym kierunku.

Smary i akcesoria
Aby zapewnić odpowiednie smarowanie maszyn, dostępny jest asortyment produktów związanych ze smarowaniem.
